|
TemplateFinder3 is the most important tool in Scorpion Vision Software.
Locating multiple objects in a scene is a very challenging tool. The tool
is developed over more than ten years with continuous improvements. The tool
design is based on a two step approach with a rotation and scale invariant
template search for object candidates. These candidates are validated
by the unique PolygonMatch™ technology
where the user can define the polygon edge model to ensure that the right
object is selected. The tool is 100% multi-core meaning that the tool runs
4x faster on a quad-core computer. The system provides true sub-pixel
accuracy.
Template matching is a technique in finding parts of an image which match
a template image.
The versatility of TemplateFinder3 - TF3 - makes it suitable for a large number
of applications:
- Robot Vision - pick and place
- 3D Stereo Vision
- Object Counting
- Object Location
- Identification System
- OCV - optical character verification
- OCR - optical character reading
The Scorpion template matchers use a standard cross-correlation
algorithm to match the template with the image.
Each match in TF3 is then optionally optimized
using a polygon edge model with PolygonMatch™ technology.
Test and Sample Profiles
TemplateFinder3 is based on these features:
- Image resampling and decimation
- Multiple templates
- Template masking
- Template rotation
- Template scaling
- Template match sorting
- Template constraints
- Number of matches
- Distance between matches
- Template visualisation
- PolygonMatch™ with sub-pixel accuracy
The TemplateFinder tool is a simple pattern matcher and are for
some tasks faster and more suitable.
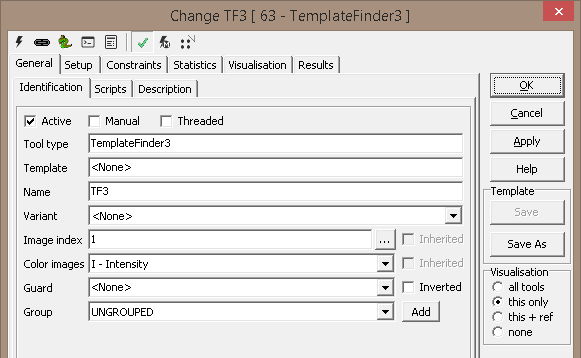
General
|
