Many recent camera models feature
RAW color coding. Scorpion Vision Software is able to support these
models.
A camera sensor can only
deliver one piece of information per pixel. This is perfect for a
monochrome camera, where every pixel reacts to all the wavelengths of
the spectrum at the same time and outputs a unique result being . the
total luminous information (called "luminance" or Y).
For color imaging, 3 pieces of information per pixel are needed.
Depending of the use of the picture, it can be (YUV) or (RGB) triplets.
YUV is often preferred when the picture is intended to human vision,
where RGB fits better computer vision and scientific use, but anyway a
triplet is needed. Cameras equipped with a single sensor chip can only
see color if a matrix of colored filters is added in front of the
sensor's pixels. The most used matrix for industrial cameras is called
"RGB Bayer array".
The sensor itself can still
deliver only one piece of information per pixel, Red, Green or Blue, but
3 are needed in order to display it in full color. A computation must
therefore take place, using the information of the adjacent pixels
(which are filtered in different colors, to simulate the 2 missing
pieces of information per pixel.
This computation creates of
course additional data:
-
that are not related fully to
the reality, because the information of adjacent pixels is used.
-
that will depend on the
computation algorithm used, and none is perfect.
-
that will increase the total
amount of data to transfer, although no more information is coming
from the sensor compared to a monochrome camera.
By default, a RAW color mode
camera will appear as a monochrome.
|
It will display a black and
white image showing a "grid" effect. This is the result of the
modulation of the light level introduced by the Bayer color
filter. A portion of such an image is shown here. |
 |
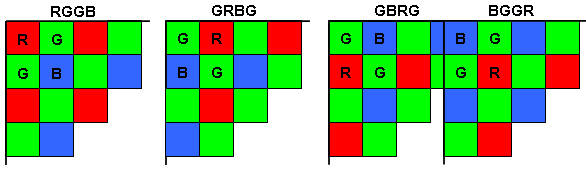
Please note that a correct display
of the colors may only be achieved knowing the geometrical offset of the
Bayer filter above the first pixel of the sensor. The corresponding
option for conversion must be selected accordingly (RGGB, GRBG, GBRG,
BGGR).