|
Scorpion Vision Software driver Mil9.dll supports Matrox
hardware which utilises Matrox MIL as interface, including:
- Matrox Concord Family of Gigabit Ethernet NICs
- Matrox Morphis Family of video capture boards
- Matrox Solios Family of framegrabbers
- Matrox Helios Family of framegrabbers
- Matrox Radient Family of framegrabbers
- Matrox Vio Family video capture and display boards
Color and monochrome cameras are supported.
The following framegrabbers are tested and verified:
The hardware comparison chart can be downloaded here..
The interface was first implemented to provide CameraLink support for
Scorpion Vision Software.
Prerequisites
- Scorpion Vision Software version 7 or higher
- Supported Matrox framegrabber installed and configured
- MIL-Lite or MIL installed
- Camera configured and detected by Intellicam and/or CCT+ tool
- Correct default DCF file specified in Mil Config.
Note: Matrox allows to install and use MIL-Lite on
computers where Matrox hardware is installed. MIL-Lite is sufficient for
Scorpion driver.
Please use Intellicam.exe found with Matrox SDK to edit DCF files.
CCT+
tool from Basler can be used to edit Basler camera registers directly.
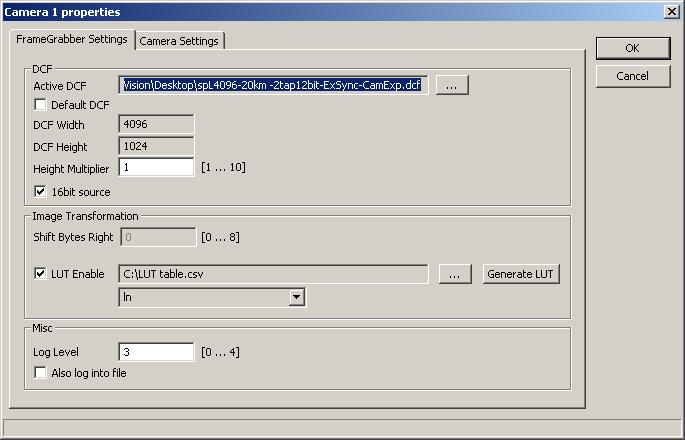
Property Pages: Frame Grabber
-
Active DCF
The user has to select valid DCF file. If 'Default' DCF is selected, then DCF specified by Matrox Mil setup will be used.
-
DCF Width/Height
Read only parameters specified in DCF file.
-
Height Multiplier
A multiplication factor for specified image height. For example, Matrox Solios
frame grabbers have on-board memory buffer of 32MB,
the largest image specified by DCF would be, e.g. 8160 x 4000. This setting
allows to overcome the limitation by increasing image
vertically as much as 10 times.
E.g. If height is 1000 and height multiplier is 5, the actual grabbed image
height is 5000 lines.
-
16bit source
Must be set when 16 bit source is specified
in DCF.
Note: applicable for grayscale images only.
- Grab Timeout
Specifies grab timeout in milliseconds.
-
Shift Bits Right
Shifts all bits in a pixel value to the right of specified number of times.
-
LUT
Apply lookup table. Lookup table must follow some rules, see
example. In drop down list choose column to
use.
Note: applicable for grayscale images only.
-
Generate LUT
Logarithmic LUT table generation.
-
Log level
Level 0 suppresses all messages.
Level 1 issues error and warning messages.
Levels 2,3,4 issue diagnostic messages. Beware that level 4 produces a
lot of messages therefore should be used only on small size images for
diagnostic purposes only.
- Also log into file.
Write camera related messages into log file. Normally messages are
written only on Scorpion console, provided console is enabled for camera
messages.
Logarithmic LUT table generation
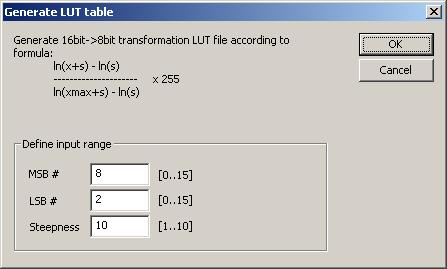
- MSB #
Most significant bit.
- LSB #
Least significant bit.
-
Steepness
Steepness parameter s.
Property Pages: Camera settings
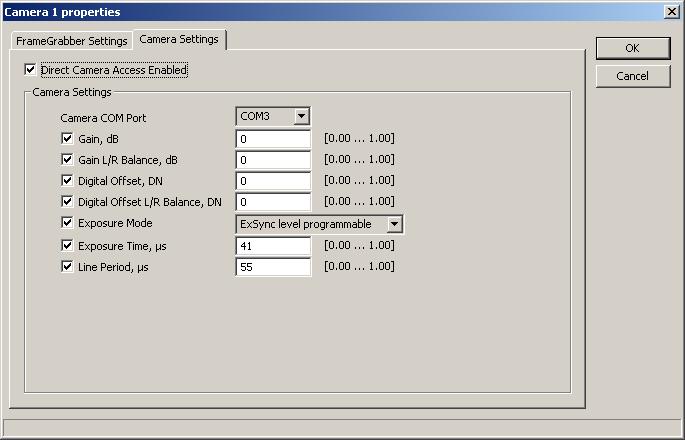
Matrox Solios frame grabber emulates serial port interface as Camera COM
port. The settings in this tab reflect Basler Line Scan L801 camera registers.
Scorpion Vision driver uses camera port only when actually reading/writing
register values, therefore this dialog can be used alongside with Basler
CCT+. However it must be understood that simultaneous access from both
places to camera registers will fail.
Camera Property Access from python scripts
The following Basler Line Scan L801 camera registers can be accessed via
'SetProperty' and 'GetProperty' commands:
Dynamic Parameters
-
'ExposureTime'
-
'LinePeriod'
-
'ExposureMode', values:
- 0: "Free run programmable"
- 2: "Free run edge controlled"
- 4: "ExSync level controlled"
- 5: "ExSync level programmable"
- 6: "ExSync edge controlled"
- 'Gain'
- 'GainBalance'
- 'DigitalOffset'
- 'DigitalOffsetBalance'
Mdig Properties
-
'MdigControl'
calls MdigControl ( ControlType, store_value).
-
'MdigInquire'
calls ControlValue= MdigInquire(store_value)
note: call 'StoreValue' prior to Mdig commands to
provide parameter value, see example below
Static Parameters
-
'Width'
-
'Height'
-
'HeightMultiplier'
Note: Camera must be reset after setting Static
Parameters
Example 1: Setting Static Parameter 'HeightMultiplier'
cam = GetCamera('0')
cam.setProperty('HeightMultiplier', 2)
ExecuteCmd('Camera', 'CameraNo=1;Cmd=Reset')
Example 2: Calling Mdig functions
cam = GetCamera('0')
cam.setProperty('StoreValue', M_ENABLE)
cam.setProperty('MdigControl', M_ROTARY_ENCODER)
cam.setProperty('StoreValue', M_GRAB_FAIL_STATUS)
status = cam.getProperty('MdigInquire')
|
