|
This
tool makes a transformation based on four corresponding points from local
image coordinates to a two dimensional external coordinate system.
Application areas:
-
Measurement systems
- 2D Robot Vision
The tool is normally connected to the calibrator tool improving the
precision of a 2D robot vision system with a factor of 10.
Connecting the local coordinates to image processing results from other
tool can be used for dynamic transformations. The import function is made to
make the calibration procedure automatic.
Setup
Coordinate system
- Reference - Reference for the local coordinates
Points
- Local coordinates -
Four
to six local coordinates in the image.
Each point is given by x, y-coordinates
-
Import - import current values from the Imports page
(see below)
- External coordinates -
Four
to six external coordinates. The internal coordinates are mapped to these.
Each point is given by x, y-coordinates.
The local points can be managed by the buttons

- Paste - paste the ROI from the image to the scorpion clipboard
- Copy - copy the ROI to the image from the scorpion clipboard
More on Point and
Click Operations
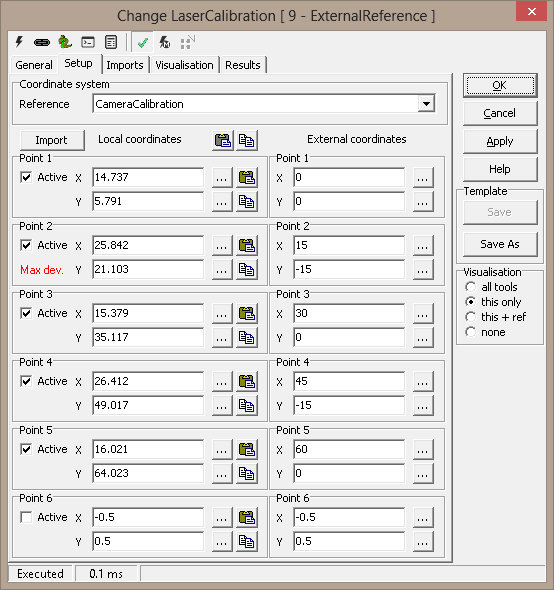
The transformation handles
rotation, translation, scaling and perspective effects. At least four mapped
points are needed to create the transform, but up to two extra points can be
added to provide a quality measure. The transform is created in a
least-mean-square sense, where nonzero values of the RMS error, mean or max
deviation signal some inaccuracy. (Large values most often result from
ill-positioned local points.)
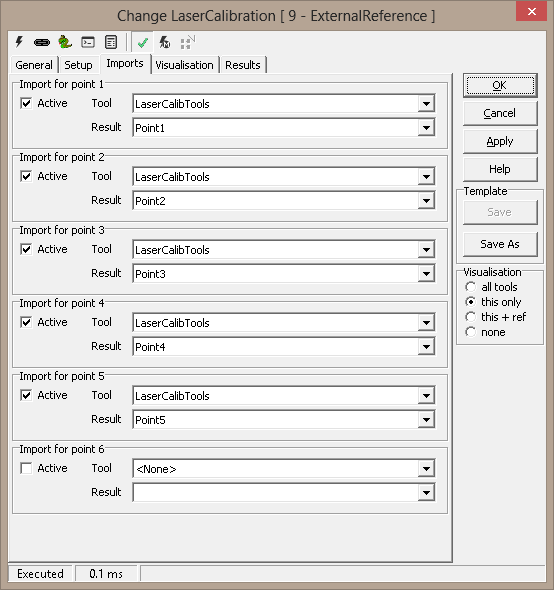
Imports
You can set up tools to provide points to your calibration. For example a
blob tool, or a line intersection tool. When the tool has a correct value,
you can import the current value into your ExternalReference as a
static number.
- Active - activate/deactivate import of this point (when the
Import button on the Setup page is clicked)
- Tool - the tool providing the point
- Result - the point result from the selected tool
Hints
RMS value shall be in the same order of magnitude of
the pixel size.
Visualisation
|
Axes
|
The
coordinate system axes
|
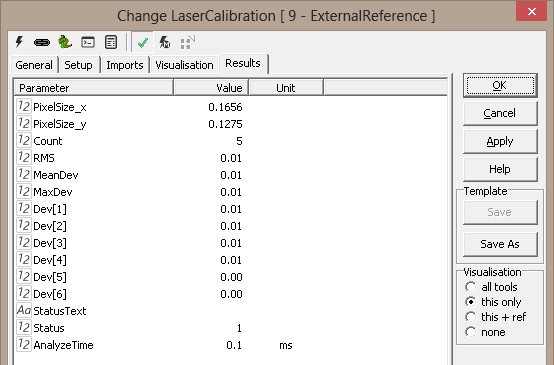
Results
|
Pixel
size.x/.y
|
The
size of the pixels
both in x and y direction
(given
in the units of the reference)
|
|
Number of points |
The number of active points |
|
RMS error |
Root mean square of fit - always zero when four points
are used - given in reference units (local coordinates - reverse
mapping) |
|
Mean deviation |
Mean deviation of all points when reverse mapping is applied - given
in reference units |
|
Max deviation |
Max deviation (worst case) of all points when reverse mapping is
applied - given in reference units |
|
Deviation[N] |
Deviation in reference units (points 1..6) |
ExecuteCmd support (see also
executeCmd)
|
Command |
Parameters |
Return values |
Comments |
|
Import |
- |
ok,None |
Import all points with import active set. If the tool's config
dialog is open, it is updated. |
Profiles
| 1: |
SDP-0076-Box-Picking-from-Conveyor |
|
