|
This tool will connect and split objects in a point cloud, in effect
separating objects by proximity. The tool will find up to 8 objects, and
return ROI box details so that other tools may work on these objects.
Note: currently only the ROI boxes are output - there is no support for
delivering the subclouds constituting the objects found.
This tool needs an ordered point cloud.
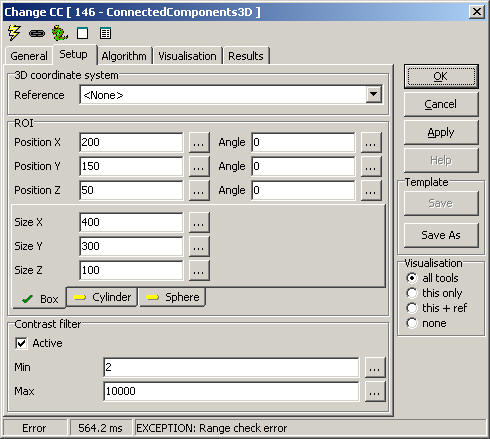
Setup 3D
coordinate system
- Reference - select a 3D reference for position
and results
ROI
Contrast filter
- Active - enabled/disabled
- Contrast - element 4 in a 5-element point cloud; set min and
max allowable value
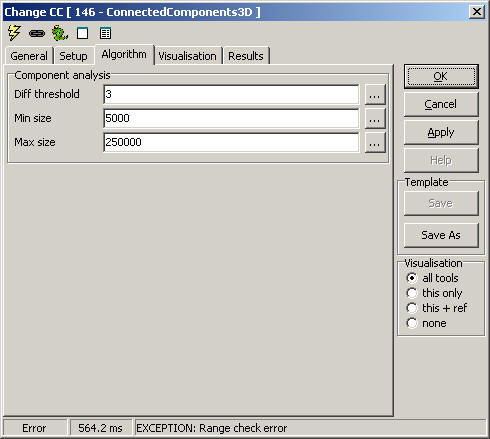
Algorithm
Component analysis
- Diff threshold - proximity threshold for separating objects
- Min size - minimum point count for accepted object
- Max size - maximum point count for accepted object
Visualisation
|
ROI |
Region of interest |
|
FilteredPoints |
Subset of point cloud filtered by contrast filter |
|
ComponentBox[n] |
Surrounding cuboid for object n, (n<=8) |
|
Points[n] |
Points in
object n, (n<=8) |
Results
|
Components |
Number of components found (up to 8) |
|
Points |
Number of points in point cloud |
|
FilteredPoints |
Number of points filtered by contrast filter |
|
Points[n] |
Point count for object n |
|
Center[n].x/.y/.z |
Center of gravity for object n |
|
Angle[n].x/.y/.z |
Rotation for object n |
|
Size[n].x/.y/.z |
Extent for object n |
ExecuteCmd support (see also executeCmd)
|
Command
|
Parameters
|
Return values
|
Comments
|
|
|
|
|
|
|
