|
This tool locates multiple objects in a point cloud using 3D Manifold
Matching. This tool needs an ordered point cloud.
Test profile
Here is a test profile
for the MaMa3D tool. It contains an ordered point cloud and a template
object (flens.txt). With the existing setup the tool will find three objects
in the point cloud using the supplied template. You can also experiment with
the Import ROI to pick templates from the point cloud.
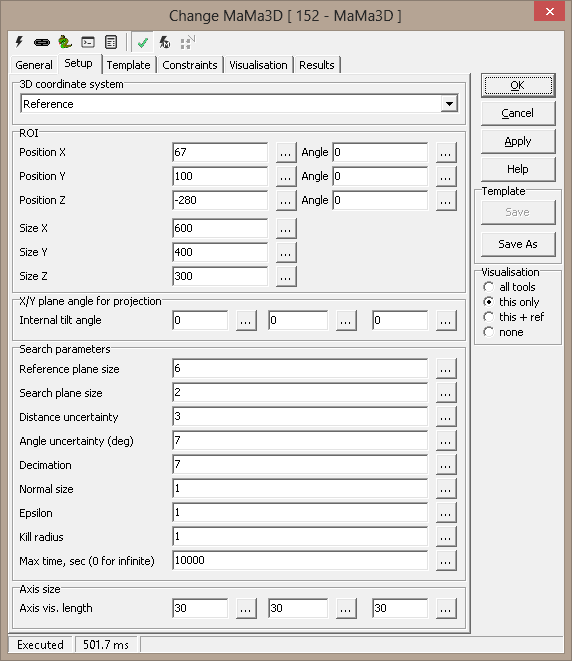
Setup3D
coordinate system
- Reference - select a 3D reference
Search parameters
Parameters that describe tolerances for matching reference point and
search point in scene:
- Reference plane size - Distance
tolerance for reference point in reference point's tangent plane
- Search plane size - Distance tolerance
for search point in search point's tangent
plane
- Distance uncertainty - General
distance tolerance
- Angle uncertainty (deg) - General
angular tolerance
Parameters
that control surface normal calculation:
- Min distance - min
z value of scene
- Max distance - max
z value of scene
- Stride - decimation
factor of scene when calculating surface normals
- Normal size - size
of neighbourhood used to calculate surface normals (unit: pixels)
Parameters
that control matching process:
- Epsilon - distance
tolerance used to check whether a template point is close enough to a
scene point
- Min coverage (%) - percentage of visible
template points that must be matched to
a scene point
- Kill radius - minimum
distance between found matches in scene
Point cloud filter
- Contrast - enabled/disabled
- Min/Max - element 4 in a 5-element point cloud; set min and
max allowable value
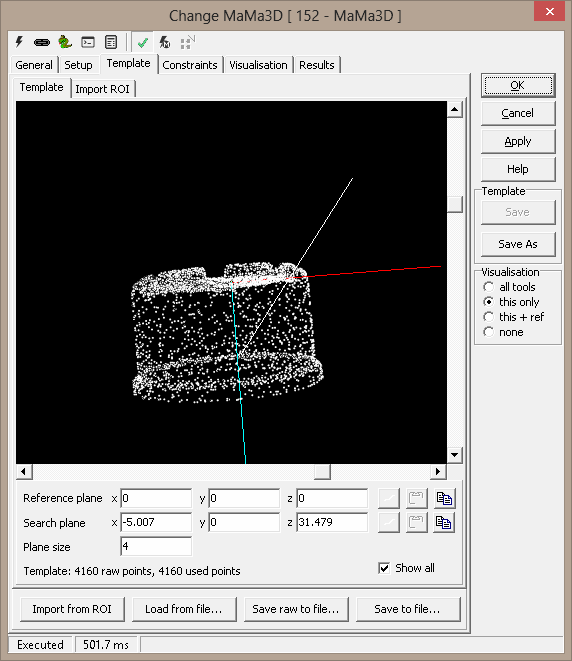
Template
Template
This displays the model with axes, and the plane normal for the search
plane. The reference system is defined from the reference and search planes.
- Reference plane/Search plane - lets you easily define these
planes for the model:
- Click a dot in the model view
- Press
 (paste) for either the
reference or search plane (paste) for either the
reference or search plane
- If needed, edit the x/y/z numbers and press
 to select the nearest point in the
model to select the nearest point in the
model
- Plane size - the size (radius) used to calculate the plane
normals for the model, when reference or search points are set.
- Import from import ROI - see Import ROI (below)
- Load from file... - currently, only text files with a point
position/plane normal (6 numbers) on each line are supported. If the
file is considered normalized, the correct reference plane and
search plane are implicitly set when loading the model.
- Save raw to file... - save current raw (original) model
- Save to file... - save normalized model. This saves the model
with a normalized coordinate system, so that the reference point is
defined as the origin (0,0,0), and the axes are oriented with x
perpendicular to the reference plane, and y pointing towards the
search plane.
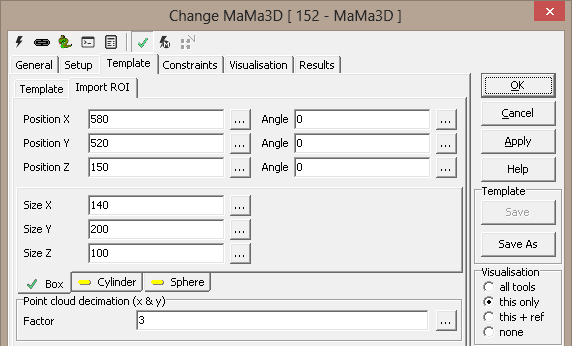
Import ROI
Specify an ROI as either a box (cuboid), a cylinder segment or a sphere
to extract a subsection from the current image as the template model.
- Position (X,Y,Z) - ROI center
- Angle (X,Y,Z) - ROI rotation
- Size (X,Y,Z) - Cuboid (box) size
- Length - Cylinder length
- Inner/Outer radius - Cylinder sector inner/outer radius
- Cylinder sector Start/End - Cylinder sector angles
- Radius - Sphere radius
- Point cloud decimation (x & y)
- Factor - decimation of point cloud
- Point cloud filter
- Contrast - Activate/deactivate
- Min/Max - contrast limits
Constraints
(none yet defined)
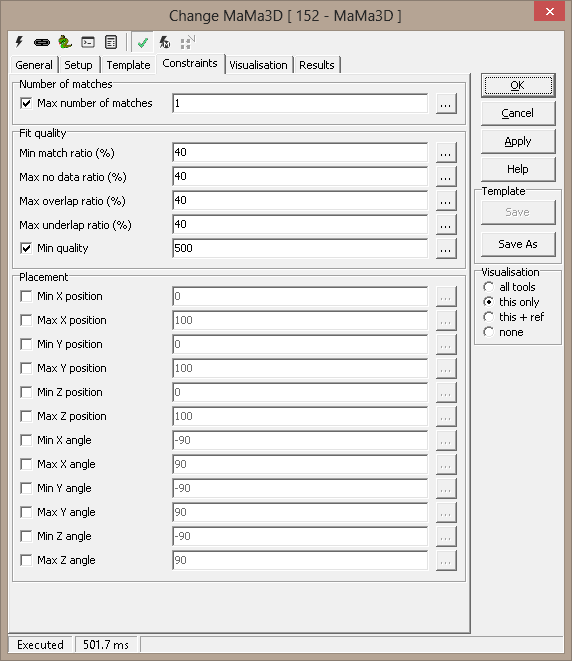
Visualisation
|
Match[1]-Match[16] |
The matched object(s) |
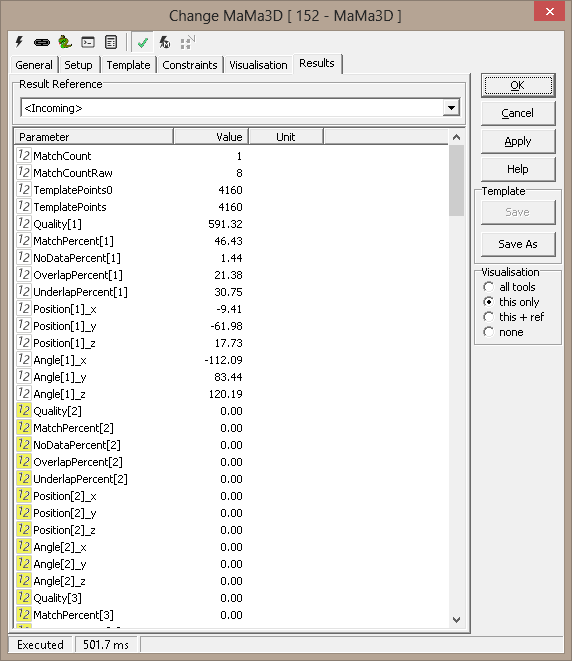
Results
|
Match count |
Number of found objects |
|
Initial template points |
Points in template model |
|
Used template points |
"Good" i.e. used points in template model |
|
Quality[n] |
Match result, object n. Smaller is better |
|
Hit percentage[n] |
Percentage of points with match, object n |
|
Position[n].x/.y/.z |
Position, object n |
|
Angle[n].x/.y/.z |
Rotation, object n |
ExecuteCmd support (see also executeCmd)
|
Command
|
Parameters
|
Return values
|
Comments
|
|
|
|
|
|
|
