|
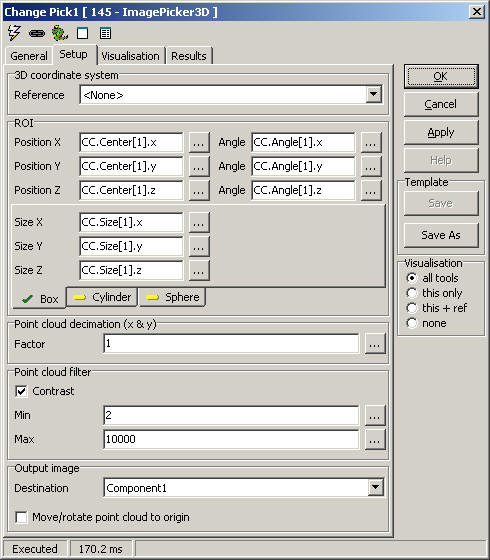
This tool extracts points within an ROI from a pointcloud, creating a
subset pointcloud in a new image, possibly decimated and/or contrast
filtered.
Setup3D
coordinate system
- Reference - select a 3D reference for position
and results
ROI
Point cloud decimation (x & y)
- Factor - keep only every nth sample in x and y
directions
Point cloud filter
- Contrast - element 4 in a 5-element point cloud; set min and
max allowable value
Output image
- Destination - output image
- Move/rotate point cloud to origin - normally, the point cloud
subset is transferred to the new image with the original position
values. If this is checked, the resulting point cloud is moved/rotated
in space to be centered around the origin. The ROI's axes are aligned
with the output axes.
Visualisation
|
ROI |
Region of interest |
|
Points |
The transferred points |
Results
|
Point count |
Number of points transferred |
|
Rotation.x/.y/.z |
ROI rotation, if any |
|
Translation.x/.y/.z |
ROI translation, if any |
ExecuteCmd support (see also executeCmd)
|
Command
|
Parameters
|
Return values
|
Comments
|
|
|
|
|
|
|
