|
The PCA (Principal Component Analysis) tool searches a point cloud within
an ROI, and returns the principal directions and corresponding eigenvalues
(roughly related to the square of the extent in that direction). The
major (X) axis of the returned reference system will be aligned with where
the point cloud has the largest spread.
Setup3D
coordinate system
- Reference - select a 3D reference for position
and results
ROI
Point cloud decimation (x & y)
- Factor - keep only every nth sample in x and y
directions
Point cloud filter
- Contrast - element 4 in a 5-element point cloud; set min and
max allowable value
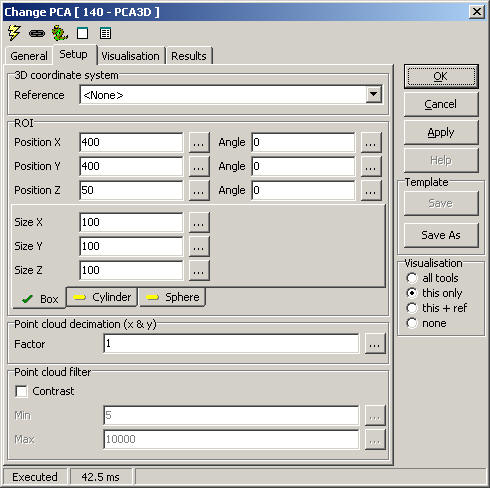
Visualisation
|
ROI |
The ROI cube/cylinder segment/sphere |
|
Points |
All points within the ROI |
|
Eigenvectors |
The lengths are visualized as the square root of the eigenvalues |
Results
|
Center.x/.y/.z |
The mean of all points |
|
Point count |
Number of points within the ROI |
|
Eigenvector1.x/.y/.z |
Normalized eigenvector 1 (major axis) |
|
Eigenvector2.x/.y/.z |
Normalized eigenvector 2 |
|
Eigenvector3.x/.y/.z |
Normalized eigenvector 3 (minor axis) |
|
Eigenvalue1 |
Describes the spread in this direction |
|
Eigenvalue2 |
Describes the spread in this direction |
|
Eigenvalue3 |
Describes the spread in this direction |
ExecuteCmd support (see also executeCmd)
|
Command
|
Parameters
|
Return values
|
Comments
|
|
|
|
|
|
|
