|
CircleSegmentor is a multistage tool to identify and
separate circular objects in the image. The following steps are invoked to
locate circular objects:
-
Edges (high gradient areas) in the image are
located using a Sobel filter, possibly combined with the Canny algorithm
-
A RANSAC search is performed, identifying possible
circles with a given diameter or diameter range
-
A PolygonMatch search follows, locating the circles
with subpixel accuracy
-
[Optional] A secondary PolygonMatch is run,
where the user can add other identifying polygons using a Polygon Wizard
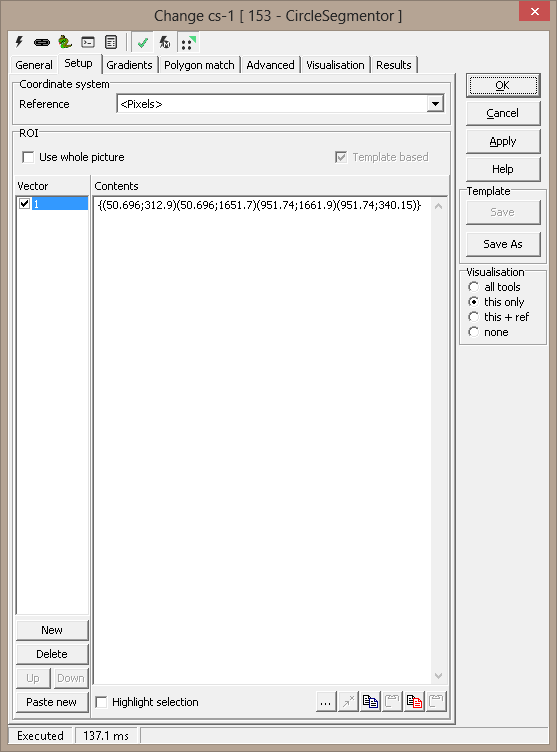
Setup
Reference - Reference system selection
ROI
- Use whole picture - do not use the ROI polygons
- Vector/Contents - the ROI consists of the interior of all
polygons defined
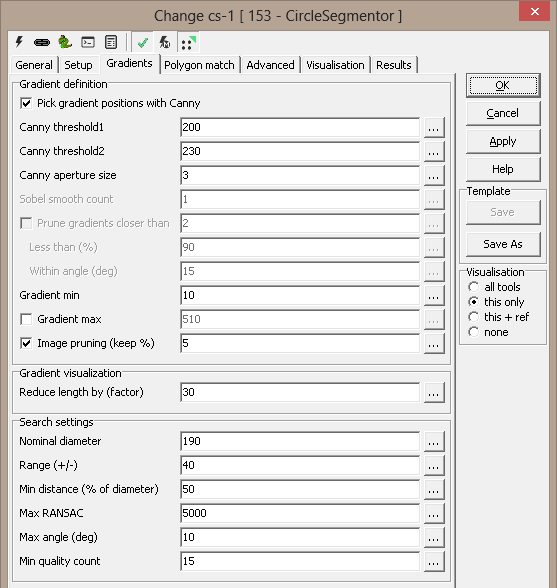
Gradients
Gradient definition
-
Pick gradient positions with Canny
- If checked, the Canny algorithm from
OpenCV is used to
find edges.
-
Canny threshold1/2
- the larger value is used to find initial edges, the smaller is used in
linking them.
-
Canny aperture size
- Sobel aperture for Canny
-
Sobel smooth count
- if Canny is not used, an internal Sobel algorithm is used to find
edges. This offers additional smoothing of the image.
-
Prune gradients closer than
- if Canny is not used, the number of large gradients may become large.
Gradients can be pruned within a neighbourhood if they differ in size
but not angle:
-
Gradient min
- ignore gradients smaller than this value
-
Gradient max
-
ignore gradients larger than this value
-
Image decimation
- decimate image in both X and Y before the analysis
-
Gradient decimation
- decimate number of found gradients prior to RANSAC
Gradient visualization
Search settings
-
Nominal diameter
- Size of circles to search for
-
Range (+/-)
- Size range
-
Min distance
- Do not report circles closer than this
-
Max RANSAC
- Max number of RANSAC tests
-
Max angle (deg)
- An accepted gradient must point toward the circle center with max this
angle error
-
Min quality count
- Number of accepted gradients to identify a circle
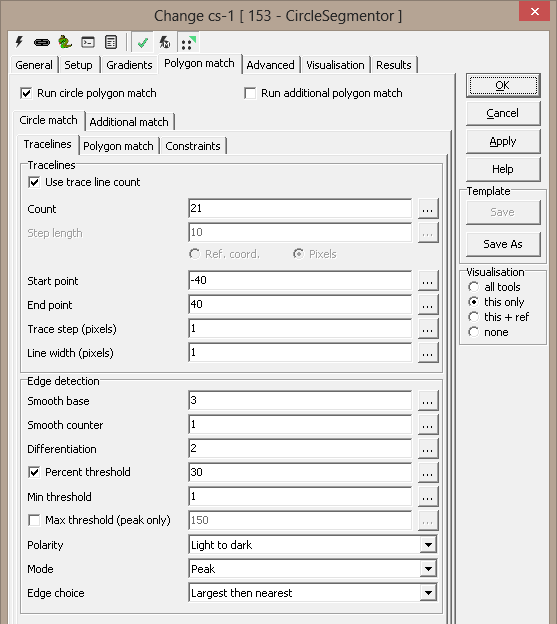
Polygon match
There are two polygon match stages in CircleSegmentor. By default stage 1
(Circle match) is active, while stage 2 (Additional match) is disabled.
Stage two is intended to differentiate circles based on other marks or
identifiers.
Circle match
Run circle polygon match
- if disabled, neither polygon match step is run. Useful to evaluate the
gradient/RANSAC steps.
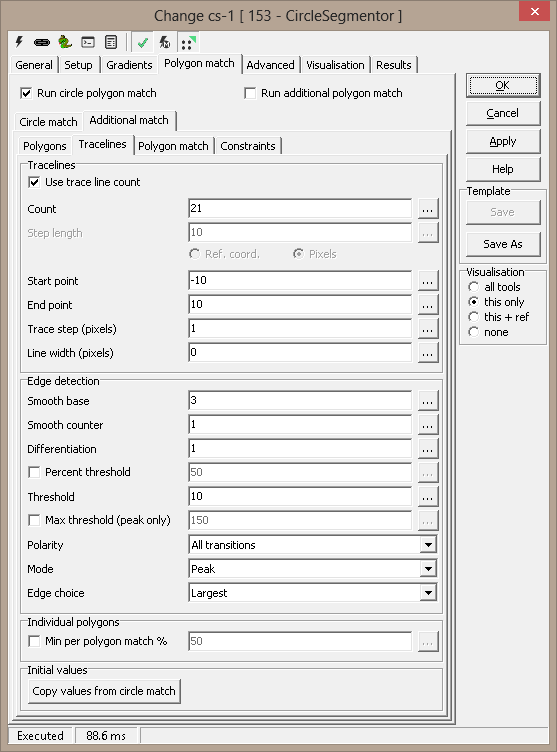
Tracelines
-
Use Traceline Count - selects to specify the traceline count
-
Count - number of
trace lines
- Step length - distance between traceline
-
Start point - position of
starting point on trace line given in reference coordinates
- End point - position of
end point on trace line given in reference coordinates
- Inverted the sign of start
and stop point will change the direction of the trace comb
Trace step (pixels)
- normally 1 - given in pixels
Line width (pixels) - 0 - trace line is not averaged - a higher
value will average 2N+1 pixels perpendicular to the trace comb
Edge detection
- Smooth base - 3 is normally a good value
- Smooth counter - 1 default - given i pixels
- The smoothing increasing with higher values
- Differentiation
- 0 - give threshold
- 1 - 1. order differentiation - the derivative - default normally
used
- 2 - 2. order differentiation
- Threshold - the threshold or sensitivity of the edge detector -
a lower value increases the sensitivity
- % activates adaptive - threshold is set to N % of maximum values of
edges
- Minimum treshold define minimum value of threshold to accept when
adaptive treshold is active
- Polarity - All transitions | Light to dark | Dark to light
- Mode - Peak | Threshold
- Edge choice - First | Largest | Last | Nearest | First then nearest
| Largest then nearest
- Largest is
default and normally the best choice
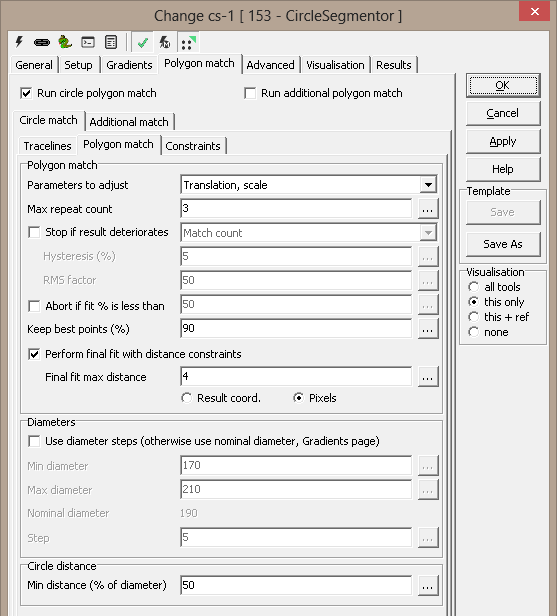
Polygon match
-
Parameters to adjust
-
Translation, scale - default
-
Translation - translation only, most useful
when diameter is known
-
Max repeat count - the number of iterations
to fit the polygons
-
Stop if result deteriorates - if the
polygonmatch seems to fail, do not process further
-
Match count/RMS/RMS factor - determines
which result to evaluate
-
Hysteresis (%) - allow a small drop in
performance
-
RMS factor - weight for RMS if both RMS and
match count is used to measure the match
-
Abort if fit % is less than - stops matching
process if less than % edge points is located
-
Keep best points (%) - the percentage of
edge points used in iteration
-
Perform final fit with distance constraints -
default on - added to be able to investigate polygon matching in detail
Diameters
-
Use diameter steps (otherwise use nominal
diameter, Gradients page) - if checked, run a series of matches with
increasing diameter. Useful to find circles with varying size.
-
Min diameter - start at this value
-
Max diameter - end at this value
-
Step - with these steps in between
Circle distance
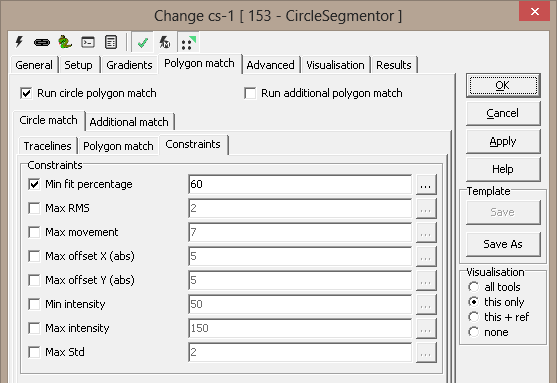
Constraints
-
Min fit percentage - percentage of edge
points within range
-
Max RMS - mean edge point inaccuracy
-
Max movement - distance from original
position
-
Max offset X (abs) - X distance from
original position
-
Max offset Y (abs) - Y distance from
original position
-
Min intensity - min intensity within the
circle
-
Max intensity - max intensity within the
circle
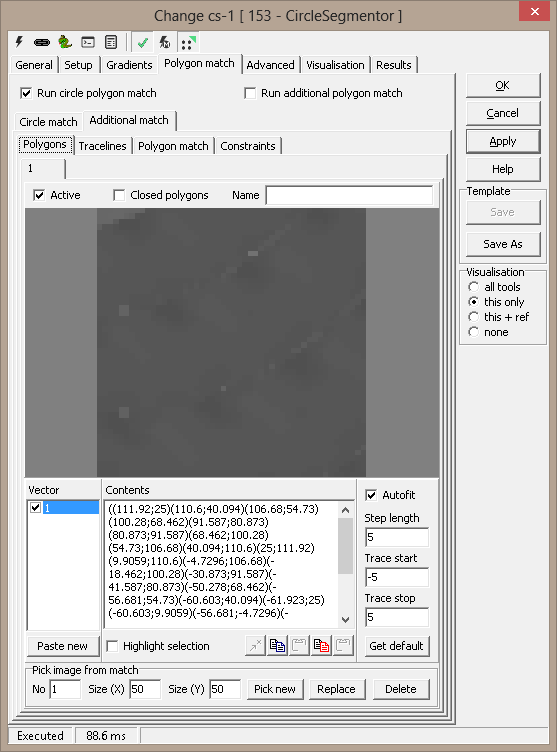
Additional match
The secondary polygon match stage is run centered at each accepted match
from the Circle match stage. After a succesful stage 1, the tool lets
you import an image around any of the original matches. Here you can use the
polygon wizard to draw polygons matching interesting features within or
outside the found circle.
Run additional polygon match
- disabled by default
Polygons
Polygon
properties
Polygon Editor
- Numbered list - ordered list of polygons. Each polygon can be
made active/inactive by clicking the checkbox in front of the number. It
can also have its own custom trace line settings, indicated by a red
color (2 *)
- Contents - the points of the selected polygon
- Paste new - creates a new polygon and pastes the polygon from the
clipboard - this is the quickest way to create many
polygons
- Highlight selection - highlights the selected polygon in the
image
- used to identify a polygon in the image
- Copy - copies the selected polygon to the clipboard
- Paste - pastes the clipboard to the selected polygon - will overwrite
an existing polygon
Vector mouse menu - activate by right mouse clicking in
the Vector list
- New - creates a new vector
- Delete - deletes the selected vector
- Custom... - open dialog to define settings for a single polygon
- Set defaults - remove custom settings for a polygon and revert to
defaults
- Paste new - paste clipboard as new polygon
- Up - moves polygon up in list
- Down - moved polygon down in list
- Delete all - removes all polygons from list
- Delete empty vectors - remove all empty polygons
Pick image from match
An image can be imported when the Circle match step is successful.
- No
- which match to import
- Size X/Y
- image size in reference coordinates
- Pick
- An image is imported, overwriting any earlier picture and polygons
-
The pixel size is as close to the original image as possible
- For your convenience, a first polygon is inserted which is the
circle itself. This can be deactivated and/or deleted
- Clear
- Remove the imported image and any polygons
Autofit
- Polygon Model Wizard
Using the Polygon Model Wizard Scorpion helps you create optimal edge
polygons for Polygonmatch.
- Autofit
- When active Ctrl LMouse will make an edge contour along a path or
an object
The traceline settings are defined under the Tracelines tab except:
- Step length
- Start and End of trace lines
Visualize will display the trace line - see image to the right
Note: If Edge trace is difficult - verify wizard settings - long
trace lines may cause problems around edge or in corners.
Polygon properties dialog - vector list Custom choice:
Each polygon can have its own settings, overriding the default values.
The custom settings include open/closed, tracelines and edge detection.
Hint: Use individual polygon traceline setting to improve the
model
Tracelines
-
Use Traceline Count - selects to specify the traceline count
-
Count - number of
trace lines
- Step length - distance between traceline
-
Start point - position of
starting point on trace line given in reference coordinates
- End point - position of
end point on trace line given in reference coordinates
- Inverted the sign of start
and stop point will change the direction of the trace comb
Trace step (pixels)
- normally 1 - given in pixels
Line width (pixels) - 0 - trace line is not averaged - a higher
value will average 2N+1 pixels perpendicular to the trace comb
Edge detection
- Smooth base - 3 is normally a good value
- Smooth counter - 1 default - given i pixels
- The smoothing increasing with higher values
- Differentiation
- 0 - give threshold
- 1 - 1. order differentiation - the derivative - default normally
used
- 2 - 2. order differentiation
- Threshold - the threshold or sensitivity of the edge detector -
a lower value increases the sensitivity
- % activates adaptive - threshold is set to N % of maximum values of
edges
- Minimum treshold define minimum value of threshold to accept when
adaptive treshold is active
- Polarity - All transitions | Light to dark | Dark to light
- Mode - Peak | Threshold
- Edge choice - First | Largest | Last | Nearest | First then nearest
| Largest then nearest
- Largest is
default and normally the best choice
Initial values
- Copy values from circle match - a convenient way to pick
default traceline settings
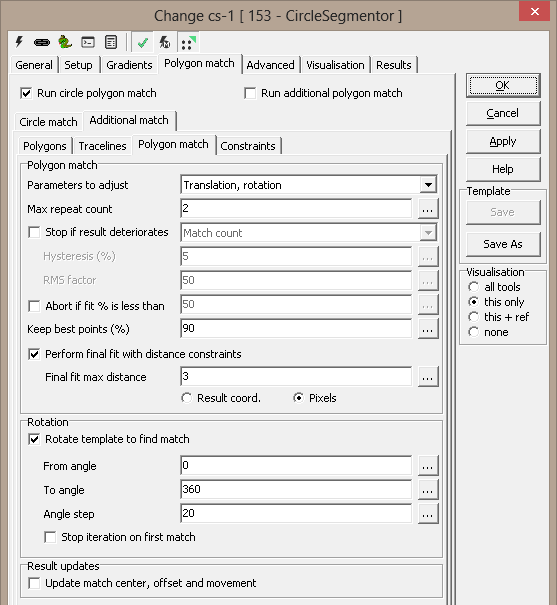
Polygon match
-
Parameters to adjust
-
Translation, rotation, scale - default
-
Translation, rotation - translation and
rotation only, most useful when diameter is known
-
Max repeat count - the number of iterations
to fit the polygons
-
Stop if result deteriorates - if the
polygonmatch seems to fail, do not process further
-
Match count/RMS/RMS factor - determines
which result to evaluate
-
Hysteresis (%) - allow a small drop in
performance
-
RMS factor - weight for RMS if both RMS and
match count is used to measure the match
-
Abort if fit % is less than - stops matching
process if less than % edge points is located
-
Keep best points (%) - the percentage of
edge points used in iteration
-
Perform final fit with distance constraints -
default on - added to be able to investigate polygon matching in detail
Rotation
Result updates
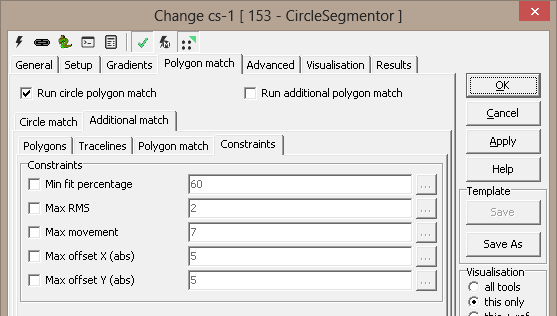
Constraints
-
Min fit percentage - percentage of edge
points within range
-
Max RMS - mean edge point inaccuracy
-
Max movement - distance from original
position
-
Max offset X (abs) - X distance from
original position
-
Max offset Y (abs) - Y distance from
original position
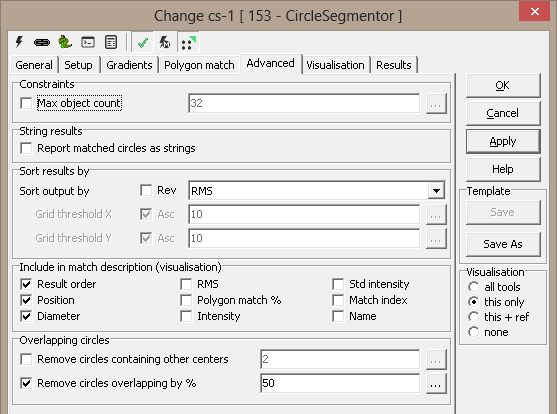
Advanced
Constraints
- Max object count - limit reported circles
String results
- Report matched circles as strings - report the found circles
as Python tuples.
- If polygon match step 2 is run, the result is the first active
polygon on the polygon list (normally the circle)
Sort result by
- Rev - reverse
- RMS/Match percent/Diameter/X position/Y position/Grid X then
Y/Grid Y then X - sort criterion
- Grid threshold X/Y - defines the grid size
- Asc - ascending
Include in match description (visualisation)
Include in the onscreen description of match
- Result order
- Position
- Diameter
- RMS
- Polygon match %
Visualisation
|
Added |
New candidate points added by the RANSAC search |
|
Center |
Found circle centers |
|
Description |
|
|
EdgePoints
|
|
|
EdgePointsOrig
|
|
|
FittedPoints
|
|
|
FittedPointsOrig
|
|
|
Gradient |
Gradients picked by Sobel/Canny |
|
MatchedPolygon |
The best fitted polygons |
|
MissingPoints
|
|
|
MissingPointsOrig
|
|
|
OriginalPolygon |
The original model |
|
OutlierPoints
|
|
|
OutlierPointsOrig
|
|
|
RawCenter |
Centers found by RANSAC |
|
Replaced |
Better candidate points found by RANSAC |
|
ROI |
Region of interest |
|
ROI Holes |
Region of interest |
|
SubROI |
Rectangles used for RANSAC search |
|
TraceLines |
Tracelines, final iteration |
|
TraceLinesOrig |
Tracelines, first iteration |
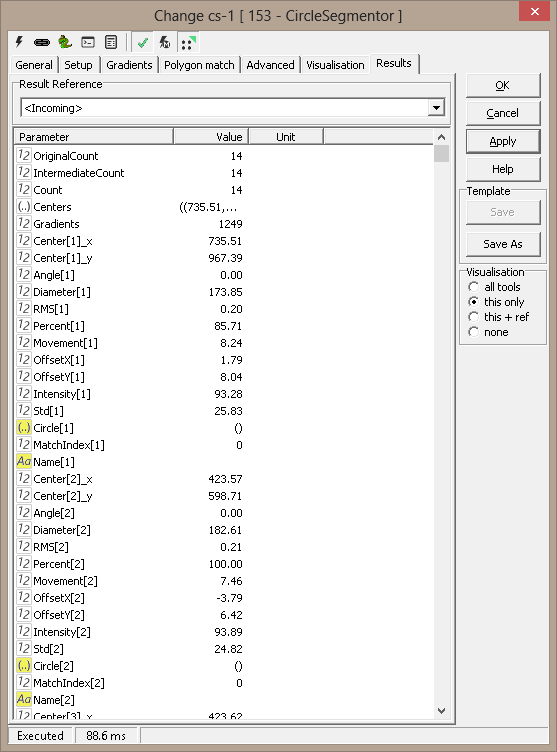
Results
|
OriginalCount |
Number of centers found by RANSAC |
|
IntermediateCount |
Number of centers found by Circle match |
|
Count |
Final number of circles |
|
Centers |
All found centers as a Python tuple |
|
Gradients |
Number of high gradients found by Sobel or Canny |
|
Center[n]_x _y |
Position of found circle n |
|
Angle[n] |
Rotation of polygon n (if Additional match is active) |
|
Diameter[n] |
Diameter of circle n |
|
RMS[n] |
Polygon fit, circle n |
|
Percent[n] |
Polygon fit, circle n |
|
Movement[n] |
Polygon match movement from raw center |
|
OffsetX[n] |
Polygon match movement from raw center (X) |
|
OffsetY[n] |
Polygon match movement from raw center (Y) |
|
Intensity[n] |
Mean intensity within circle n |
|
Std[n] |
Intensity variation within circle n |
ExecuteCmd support (see also executeCmd)
|
Command
|
Parameters
|
Return values
|
Comments
|
| Set |
Object=ROI;Value=<polygon> |
ok,None |
Sets
the first ROI polygon. See Copy/paste
ROIs for details. (*) |
| Set |
Object=ROI;Number=<number>;
Value=<polygon> |
ok,None |
Sets
the numbered ROI polygon. See Copy/paste
ROIs for details. (*) |
| Add |
Object=ROI;Value=<polygon> |
ok,None |
Adds
ROI polygon to the end of the list. See Copy/paste
ROIs for details. |
| Get |
Object=ROI;Number=<number> |
ok,<polygon> |
Gets
numbered
ROI polygon, as Scorpion polygon (StrArr format) |
| Get |
Object=Tuple;Number=<number> |
ok,<tuple> |
Gets
numbered
ROI polygon, as Python tuple |
| Clear |
Object=ROI;Number=<number> |
ok,None |
Clears
numbered polygon (makes empty) |
| DeleteAll |
- |
ok,None |
Deletes
all polygons |
(*) Note: Polygon properties
are not supported by these methods, although existing properties will be
kept when the SET command is used.
|
