|
Test profile
Here is a simpe
test profile
for the MonoPose3D tool. It contains a set of images of an object with known
dimensions (the ping-pong balls above). The images are taken with varying
camera positions (this can also be interpreted as varying object positions),
and the MonoPose3D tool calculates these positions based on a set of
RadialArcFinder tools locating the balls.
Mono3D test profile
- Locates four points on an object and resamples the
image based on the 3D Image.
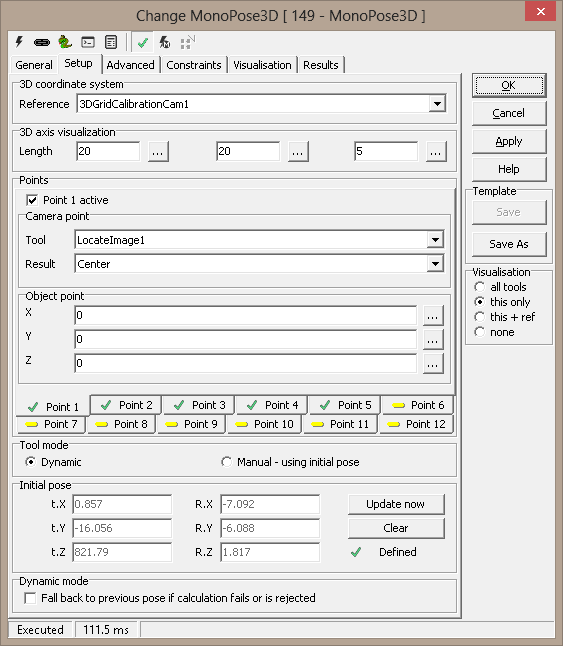
Setup
3D Reference tools - 3D Reference system
selection
3D axis visualization - the axes drawn in the image
Points - up to 12 points
These are 2D tool results connected to its corresponding 3D position.
- Active - toggle
calculation of this point
Camera point
- Tool - tool that reports
a point
- Result - which point
result to use
Object point
-
x,y,z coordinates given in the 3D coordinate system
Tool Mode
-
Dynamic - the tool updates its results based on the current image
-
Manual - using initial pose - no calculations in the image: the
initial pose is used to deliver results.
Initial Pose -
a
static pose. These numbers are read-only and for information only. They
correspond to results in the Camera Pose mode under Advanced.
- t.X, t.Y, t.Z - translation values for the initial pose
- R.X, R.Y, R.Z - rotation values (Euler angles) for the
initial pose
- Update now - use the last calculated results to update the
initial pose
- Clear - remove contents of the initial pose
Dynamic Mode
-
Fall back to previous pose if calculation fails or is rejected -
if the pose calculation fails or is rejected due to constraints, the
last result can be reissued.
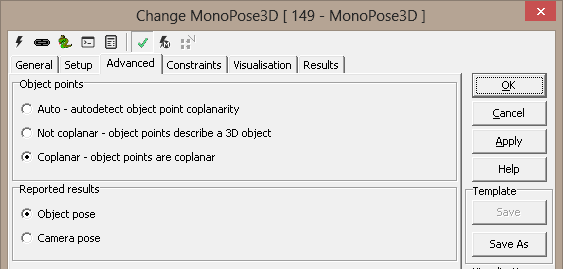
Advanced
Object points - The algorithm used by this tool changes if
the 3D object points all lie in the same plane. In general, autodetecting
this is safe, but the detection can be turned off.
- Auto - autodetect object point coplanarity
- Not coplanar - object points describe a 3D object
- Coplanar - object points are coplanar
Reported results - whether results should be reported as object
pose changes or camera pose changes
- Object pose - results reported as if the object is moving
- Camera pose - results reported as if the camera is moving (in
effect working exactly like the CameraPose3D tool)
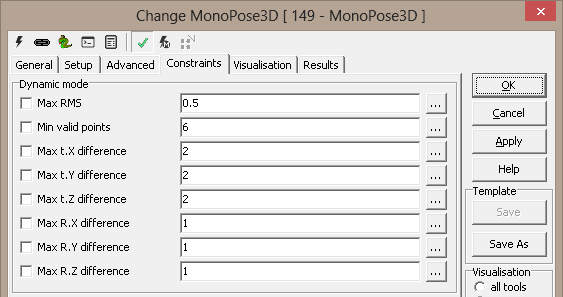
Constraints
-
Max RMS - match accuracy
-
Min valid points - fail if fewer object points were used
-
Max t.X difference - deviation from the Initial pose:
translation in X
-
Max t.X difference - deviation from the Initial pose:
translation in Y
-
Max t.X difference - deviation from the Initial pose:
translation in Z
-
Max t.X difference - deviation from the Initial pose:
rotation in X
-
Max t.X difference - deviation from the Initial pose:
rotation in Y
-
Max t.X difference - deviation from the Initial pose:
rotation in Z
Visualisation
|
Point 1-12 |
2D input points |
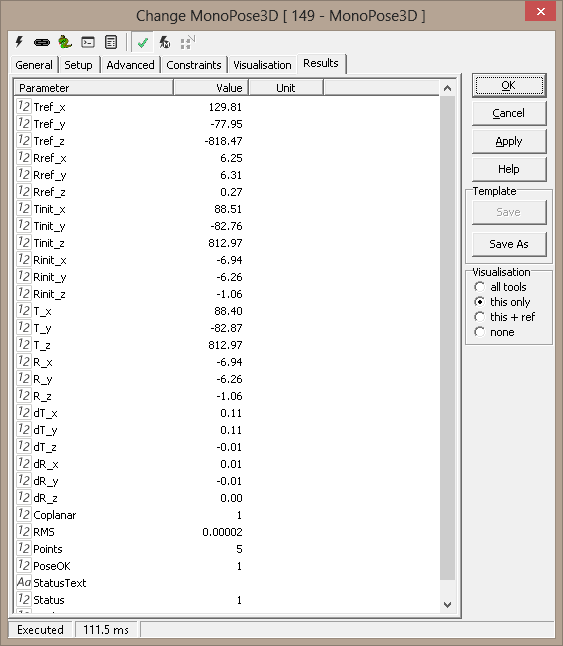
Results
|
Tref[.x/.y/.z] |
Incoming reference pose (translation) |
|
Rref.x/.y/.z[.x/.y/.z] |
Incoming reference pose (rotation) |
|
Tinit[.x/.y/.z] |
Initial pose (translation) |
|
Rinit[.x/.y/.z] |
Initial pose (rotation) |
|
T[.x/.y/.z] |
Resulting pose (translation) |
|
R[.x/.y/.z] |
Resulting pose (rotation) |
|
dT[.x/.y/.z] |
Initial/resulting pose difference (translation) |
|
dR[.x/.y/.z] |
Initial/resulting pose difference
(rotation) |
|
Coplanar |
1 if object points are coplanar |
|
RMS |
Model fit, in object units |
|
Points |
Number of valid incoming points |
|
PoseOK |
1 if current pose is OK (dynamic or manual) |
 |