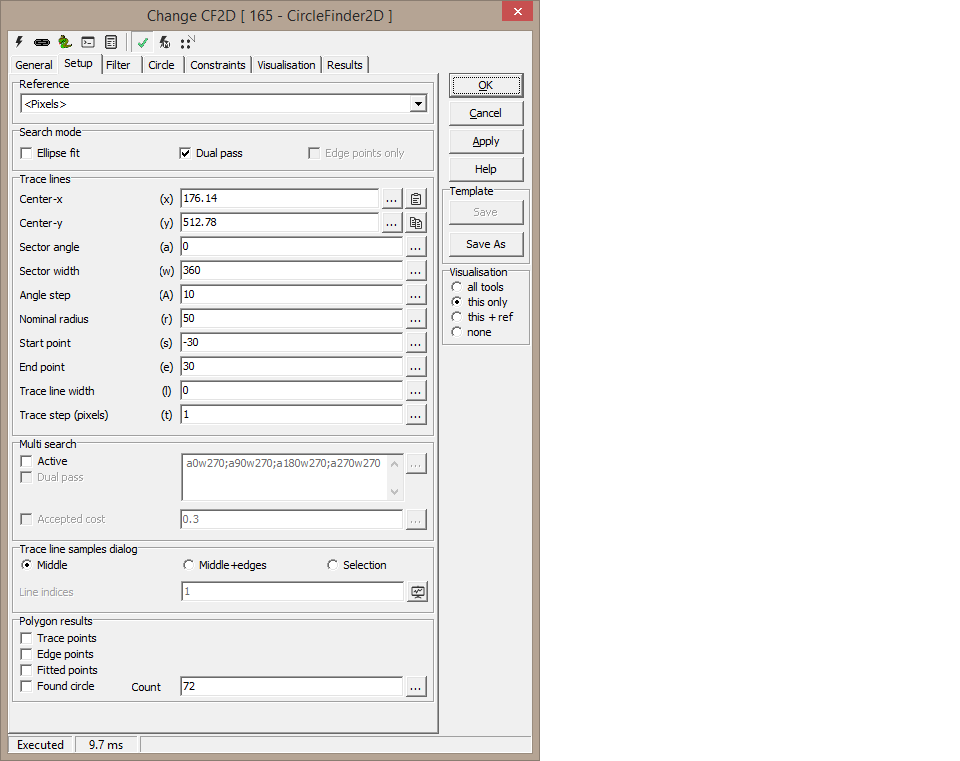
Reference - Reference system selection
Trace lines - the tool's region of interest
-
Center-x - center x of radial trace
line
-
Center-y - center y of radial
trace line
-
Sector angle - staring angle
-
Sector width - width in degrees
-
Angle step - in degrees - a
higher number reduces the number of trace lines
- Nominal radius - ROI center
-
Start point - inner ROI offset from nominal radius
-
End point - outer ROI offset from nominal radius
- Trace line width (pixels) - default 0
-
Trace step (pixels) - default 1
Note: A trace line width equal 3 means that each point of the
trace line is calculated using the pixel value. It is recommended to increase
the traceline width to improve edge detection in low contrast conditions
Point & Click Clipboard Support
The ROI can be managed by the buttons 
- Paste - paste the ROI from the image to the scorpion clipboard
- Copy - copy the ROI to the image from the scorpion clipboard
Point & Click Clipboard Support
 The
first point of the line defines the origo of the radial tracecomb. The
second point defines the tracecomb. To edit length and width of tracecomb
used the tool's fields.
The
first point of the line defines the origo of the radial tracecomb. The
second point defines the tracecomb. To edit length and width of tracecomb
used the tool's fields.
 One point will change origo of the radial tracecomb.
One point will change origo of the radial tracecomb.
Trace line samples dialog - a helper window to set trace line
filter parameters and thresholds
- Middle - show the middle trace line
- Middle+edges - shows the first, middle and last traceline
- Selection - show the selected trace lines
- Line indices - traceline selection
- example: 2,3,12-15
- example: 1 3 5 7
- Show trace line popup - activates a modeless traceline window
Example tracelines - Middle+edges is selected
Filter
Filter
- Smooth base - 3 is normally a good value
- Smooth counter - 1 default - given i pixels
- The smoothing increasing with higher values
- Differentiation
- 0 - give threshold
- 1 - 1. order differentiation - the derivative - default normally
used
- 2 - 2. order differentiation
- Mode - Peaks are default. Threshold is only used when Differentiation
is set to 0.
Edge Detection
- Polarity - Dark to light | Light to dark | All transitions
- Threshold - value lower values means more sensitivity
- Edge filter - Largest gradient | All points | First point | Last point
- The filter is used to reduce the number of edge points found
- Remove points close than - used to reduce to the number of edge points
- can speed up execution speed
- Value is specified in pixels of reference coordinates
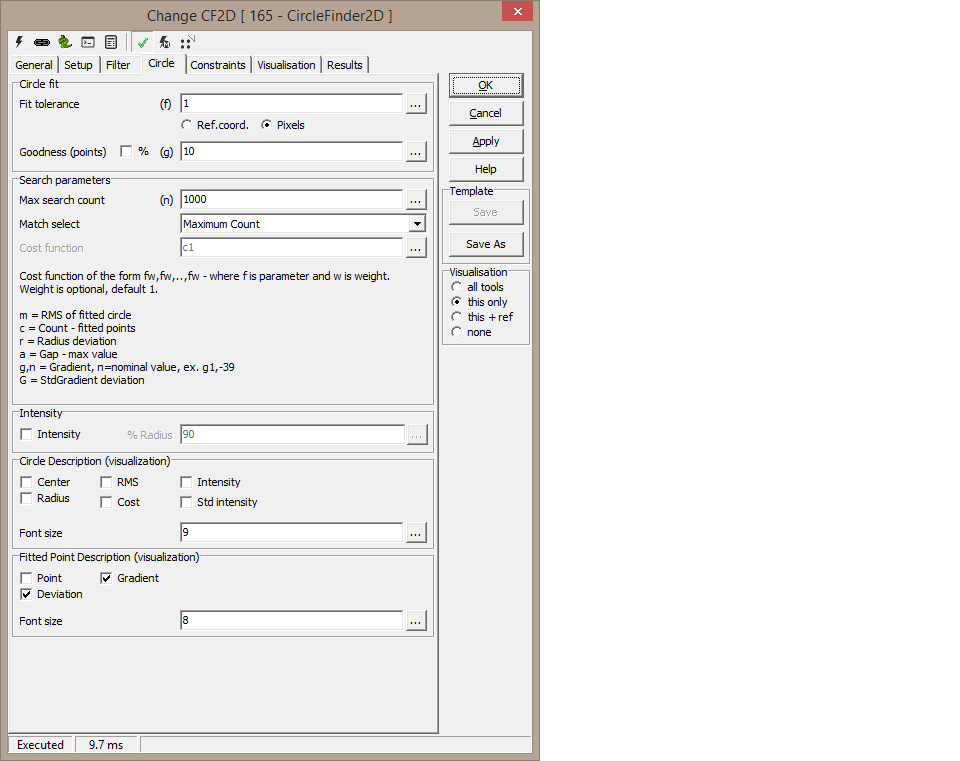
Arc Fit
- Fit tolerance - points outside tolerance is not accepted
- Tolerance given in pixels or reference coordinates
- More information - Line fit.
- Goodness (points) - minimum number of points fitted to circle to be
accepted
Arc search parameters
- Max search count - Number of iterations to find a circle
- Match Select - Most points | Best match | First match
- Most points - the most robust circle section criteria
- Best match - picks the circle with the best fit
- First match - picks the first circle accepted by Arc Fit criteria
String result
- Create string result with edge points coordinates - result generated
when active

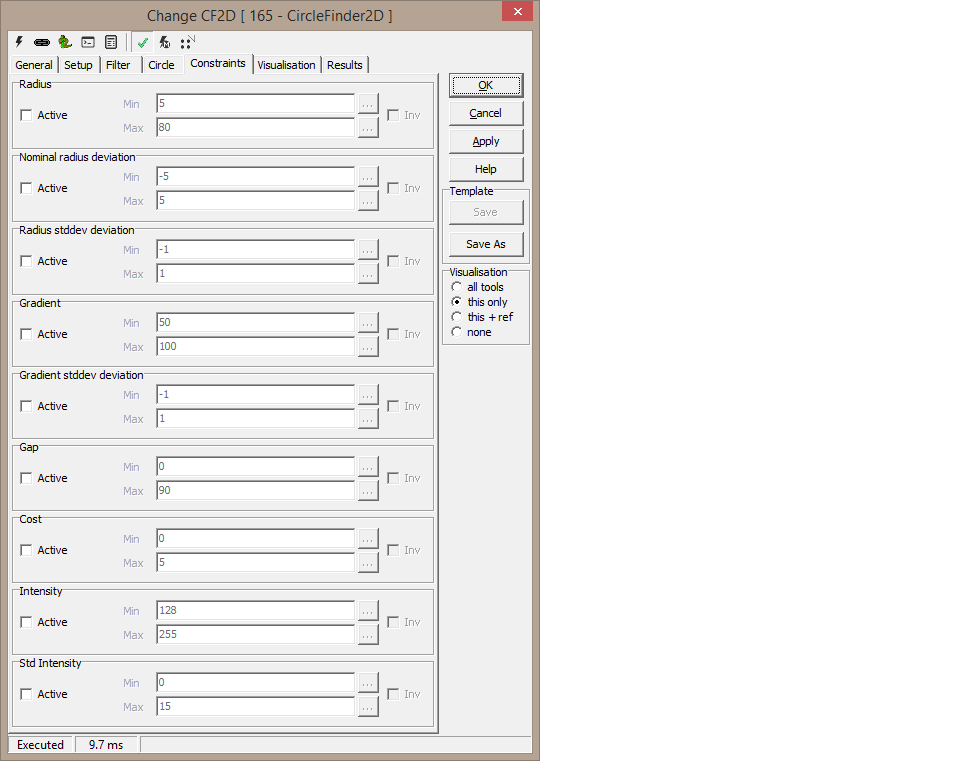
Circle
Constraints
Radius
- Min - minimum radius to accept circle
- Max - maximum radius to accept circle
Note : Constraints can be active and the constraint can be inverted
Gradient
- Min - minimum gradient to accept circle
- Max - maximum gradient to accept circle
Note : Constraints can be active and the constraint can be inverted
Results
|
Center (x,y)
|
Coordinates
of the circle’s center point
|
|
Radius
|
The
circle radius
|
|
Gradient
|
|
|
Circle-fit
|
RMS-value
of the line-fit; average deviation (the lower, the better)
|
|
Circle
coverage
|
|
Visualisation
|
Center
|
The center
of the circle
|
|
Circle
|
The found
circle
|
|
Edge points
|
The found
edge points
|
|
Error
|
|
|
Fitted
points
|
|
|
ROI
|
Region Of
Interest
|
|
Trace lines
|
Trace lines
|
ExecuteCmd support - more information
executeCmd
|
Command
|
Parameters
|
Return values
|
Comments
|
|
Set |
Object=ROI;Value=<center/baseline> |
ok,res |
Sets the tool's ROI. See Copy/paste
ROIs for details. |
|
Get |
Object=ROI |
ok,<baseline> |
Current ROI baseline |