|
Scorpion Vision Software supports the complete range of AVT Firewire
cameras using the
- uniAVTGrab.dll - Scorpion Camera Interface driver
Setting the AVT Camera driver
- Activate the Service.Camera tab
- R-mouse click the Camera Settings menu
- Select Cameradriver
- Select the uniAVTGrab.dll

More information about Allied Vision Technologies -
http://www.alliedvisiontec.com/
System Requirements
The Scorpion Camera driver is developed based on the AVT FirePackage
driver.
The table shows relationship between the uniAVTGrab.dll and FirePackage versions.
| uniAVTGrab.dll |
FirePackage |
Comment |
| 1.0.0.5 |
2.8.1 |
Replaces previous versions |
| 1.0.0.6 |
2.8.1 |
Individual camera configuration files |
| 1.0.0.7 |
2.9 |
Build for FirePackage 2.9.1 |
| 1.0.0.8 |
2.9.1 |
Replaces 1.0.0.7 |
| 1.0.0.9 |
2.9.1 |
Replaces 1.0.0.8 |
| 1.0.0.10 |
2.11 |
Built for FirePackage 2.11 uniControl.dll 1.4.0.0
|
| 1.0.0.11 |
2.11 |
Built for FirePackage 2.11 uniControl.dll 1.4.0.0
Works also with FirePackage 3.0 and Universal Package 2.1 |
| 2.1.0.12 |
3.0 |
built for FirePackage 3.0 or AVT Universal Package 2.1 |
Information:
FirePackage 2.9 contains bugs and should not
be used in any Scorpion Vision System.
Version 2.9.1 is a bug-fix release
and can be used with all uniAVTGrab.dll from 1.0.0.5 to 1.0.0.8
Using different paired versions of FirePackage and uniAVTGrab may result
in errors using camera.
FirePackage v3.0 / AVT Universal Package 2.1
This version is verified and used with Windows-7 Pro 64-bit.
FirePackage v2.11
This version is verified and used with Windows-7 Pro 32-bit.
Recommended drivers: AVTFirePackage_2_11.exe - UniAVTgrab.dll -
1.0.0.11
AVT property access
Supports standard named properties as "exposure", "shutter", "gain",
supported properties depens of camera model.
Supports Firewire register access (supported from version 2.1.x.x), see
example 2
AVT configuration files
Camera properties are stored in a xml file named as the <AVT model -
serialno>.xml, where the content of the xml-file is bound to the camera
model but not the serial number. Replacing a camera, the camera properties
may be maintained by renaming the serialno part of the filename.
AVT Property Pages
Below are the AVT property pages explained
Format page
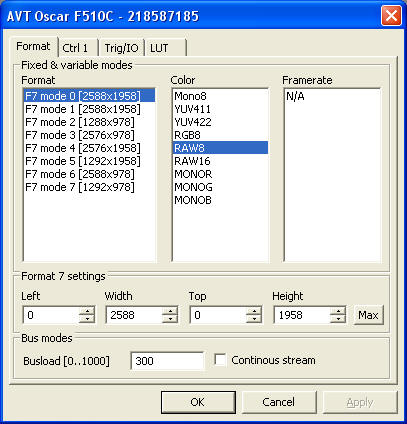
Supports both
fixed format and variable formats - format 7.
Supported color codes with resulting image format
- Mono8 - 8 bit grayscale
- YUB411 - 24 bit RGB
- YUV422 - 24 bit RGB
- RGB - 24 bit RGB
- Mono16 - 24 bit RGB
- RGB16 - 24 bit RGB
- Raw16 - 24 bit RGB
- SMono16 - 8 bit grayscale image
- SRGB16 - 24 bit RGB
- Raw8 - 24 bit RGB
- Raw16 - 8 bit grayscale image
- MonoR - 8 bit grayscale image
- MonoG - 8 bit grayscale image
- MonoB - 8 bit grayscale image
Frame rate applies to fixed formats only, for format 7 the frame rate will
depend of ROI setting. A smaller ROI will reduce busload and increase the
frame rate.
Busload must be set to maximum busload for actual camera. When multiple
cameras the total busload for all cameras must not exceed 1000 (100%) for
each fire wire adapter, ie. using 3 cameras, a busload of 300 (30%) for each
camera will balance the busload equally for each camera.
Note: The busload may need to be lower than indicated to
avoid missing images.
The camera can be set up for single shot or continuous mode. Continuous
streaming will reduce the acquisition time as the first arrived frame after
grab command will be captured, but will increase the busload. Single shot
mode reduces the busload but increases the acquisition time due to software
trigger command.
Ctrl 1 page
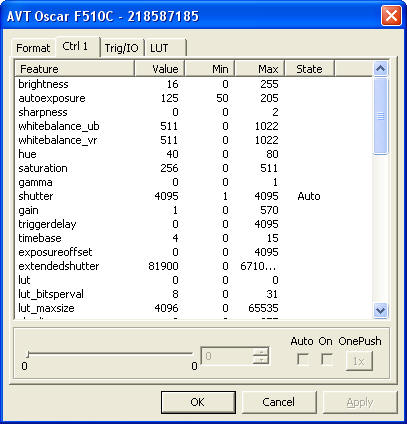
This page lists all camera properties for actual camera.
All features may
also be accessed by
camera commands or by the
Python Camera object.
Trig/IO page
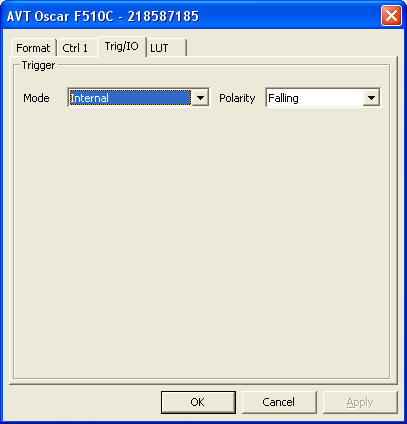
See the camera for available trigger modes.
LUT page
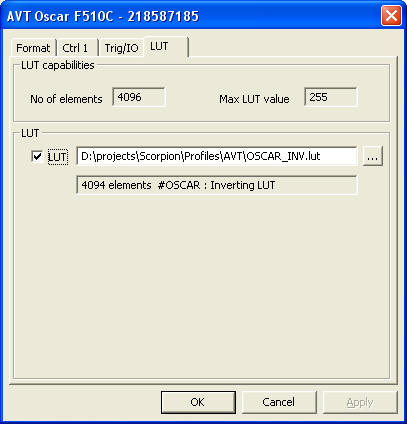
A LUT file is a text simple text file containing n values in the range of 0
to 255 (8 bit). The number of elements in the LUT is given by the cameras
internal pixel resolution (10..16 bits/pixel). Each pixel value will be
mapped to a corresponding 8 bit pixel value in the LUT.
The first line of the text file may contain a comment starting with the has
character #. The following lines in the file must contain the 8 bit mapping
value only.
Example 1: LUT file of 1024 elements where camera pixel values are
inverted:
#OSCAR: Inverting LUT
255
255
255
255
254
254
254
254
253
253
253
253
.
.
.
1
1
1
1
0
0
0
0
Example 2: accessing properties and registers using Scorpion python
camera class
def CamProps():
cam=GetCamera('0')
shutter=cam.getProperty('shutter') #get shutter value
print cam.getProperty('0xf0f0081c') #get shutter capabilities
|
