|
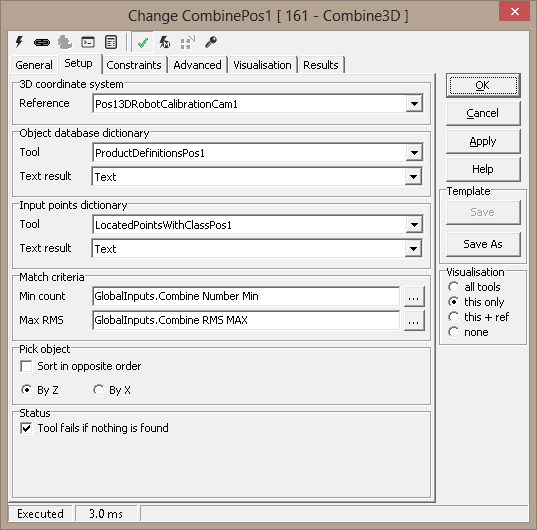
The Combine3D combines 3D features point vector with a object
references defined in the Object database dictionary.
The 3D features points are normally generated by
Locate3D.
The tool identifies and locate the complete 3D pose
all six degree of freedoms for a multiple objects.
This tool is the "Scorpion 3D Stinger" tool and a part of the
Scorpion 3D Stinger licence.
|