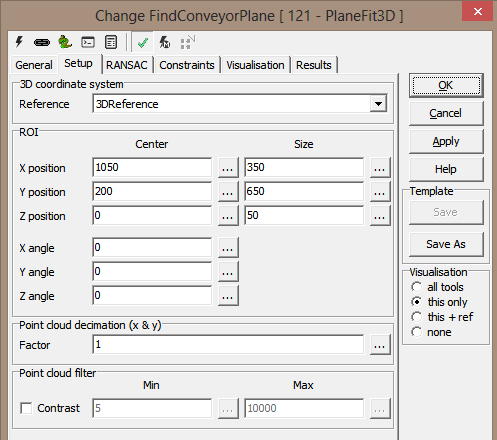
Setup3D
coordinate system
- Reference - select a 3D reference for position
and results
ROI
- X,Y,Z position
- Center - ROI box center
- Size - ROI box dimensions
- X,Y,Z angle - ROI box rotation
Point cloud decimation (x & y)
- Factor - keep only every nth sample in x and y
directions
- used to speed up processing on large point clouds
Point cloud filter
- Contrast - element 4 in a 5-element point cloud; set min and
max allowable value
RANSAC
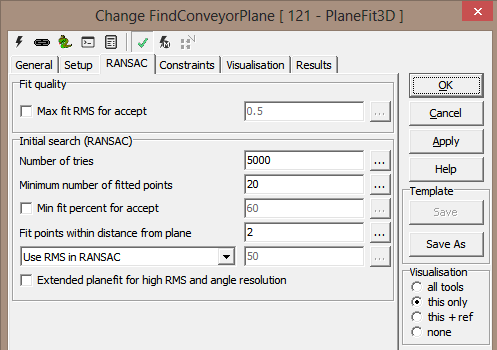
Fit Quality
- Max fit RMS for accept plane
Initial search ( RANSAC )
- Number of tries in ransac
- Minium number of fitted points
- Min fit percent for accept
- Hint - Can be enabled when fitted points
are set low
- Fit points within distance from plane
- Cost function
- Use RMS in RANSAC
- Use point count
- Use combination ( 0 = Count - 100 = RMS
) of RMS and Count
- Hint - combining count and RMS is the
best option
- Extended planefit for better RMS and angle resoolution
- runs full planefit inside RANSAC
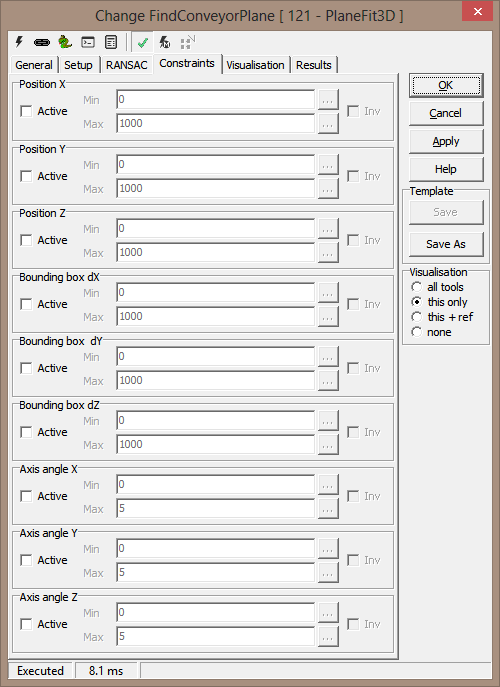
Constraints
- PositionX, PositionY and PositionZ
- filter plane on center of gravity position
- dX,dY and dZ
- Filter plane on bounding box size
- Bounding Box is size aligned with incoming reference
system axis
- angleX, angleY and angleZ
- filter the plane with regards to the angle to one of
the three incoming axis
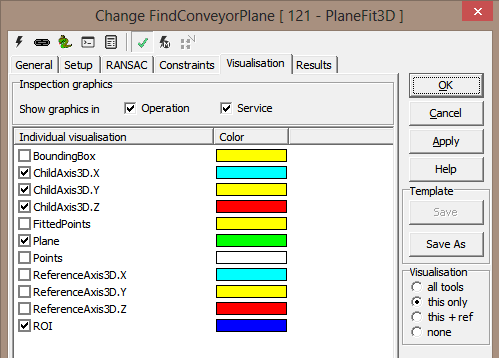
Visualisation
|
BoundingBox |
Shows bounding Box |
|
ChildAxis |
Shows child axis |
|
FittedPoints |
Accepted points within the ROI |
|
Plane |
The found plane, visualized on the edge of the ROI cube |
|
Points |
All points within the ROI |
|
ROI |
The ROI cube |
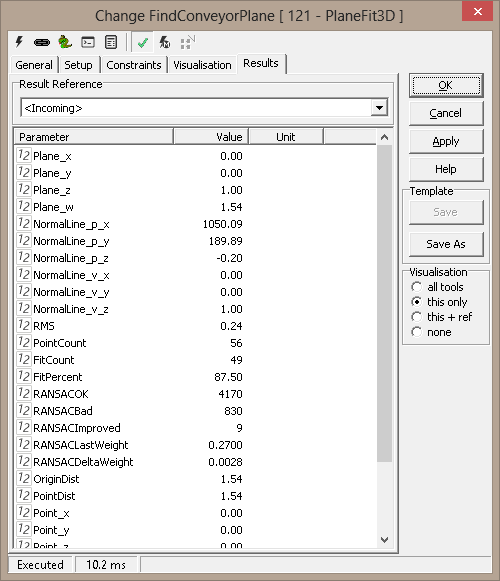
Results
|
BoundingBox |
The Bounding Box aligned with incoming reference of the selected plane |
|
Plane.x |
The plane is given as four numbers, x,y,z and w |
|
Plane.y |
See remarks below |
|
Plane.z |
|
|
Plane.w |
|
|
Center |
The Center of gravity of the plane points |
|
NormalLine.p.x |
Plane normal: a line perpendicular to the plane |
|
NormalLine.p.y |
See remarks below |
|
NormalLine.p.z |
|
|
NormalLine.v.x |
|
|
NormalLine.v.y |
|
|
NormalLine.v.z |
|
|
RMS |
Quality of fit |
|
Point count |
Total number of points within ROI |
|
Fit count |
Used points |
|
Fit percent |
Percentage of points used |
Remarks
Plane
A plane is given by the equation ax + by + cz + d = 0. The constants
a, b, c and d are given as the results Plane.x, Plane.y, Plane.z resp.
Plane.w
NormalLine
The plane normal is a unit length line with its point p
located at the center of gravity for all points used to fit the plane
(of course projected down on the plane). The vector v points
perpendicular to the plane.
Profiles
| 1: |
SDP-0076-Box-Picking-from-Conveyor |
| 2: |
STP-0061 PlaneFit3D |
|
