|
This tool creates a height map from a point cloud. A height map is
a 2D representation of the data where the intensity value corresponds to the
height (z).
An ROI box is constructed with its center along a line in 3D. A parallel
projection is performed, projecting all points perpendicularly onto the view
plane. All points within the ROI participate in the height map, but when
projected points coincide, only the closest point is used.
|
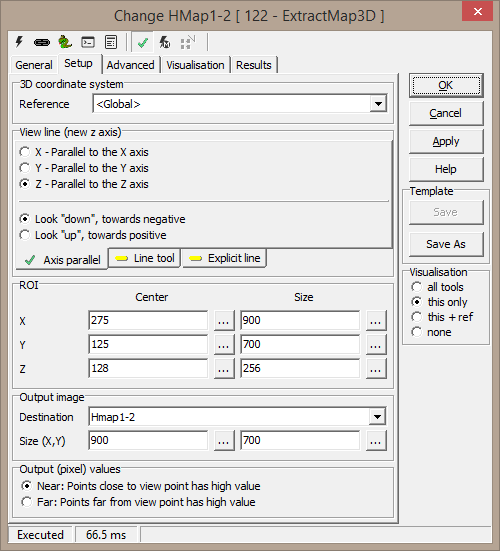
Setup3D coordinate system
- Reference - a 3D reference system
View line (new z axis)
A number of options exist to select the line of view for the tool. Each
option will create a line, along which an ROI box is created.
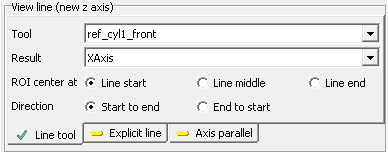
Line tool
- Tool - tool with a 3D line result
- Result - tool result to select
- ROI center at
- Line start - center ROI at line start
- Line middle - center ROI at line midpoint
- Line end - center ROI at line end
- Direction
- Start to end - look from line start to line end (line
start is closer)
- End to start - look from line end to line start (line
end is closer)
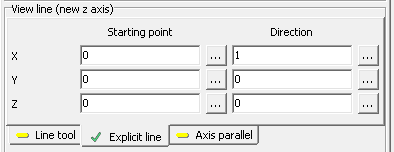
Explicit line
- X,Y,Z
- Starting point - line start
- Direction - line direction
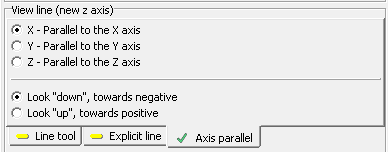
Axis parallel
- X - parallel to the X axis - view line inparallel with X
axis
- Y - parallel to the Y axis - view line inparallel with Y
axis
- Z - parallel to the Z axis - view line inparallel with Z
axis
- Look "down", towards negative - look towards minus
infinity
- Look "up", towards positive - look towards plus infinity
ROI
- X,Y,Z
- Center - ROI box center
- Size - ROI box dimensions
Output image
- Destination - where to place the result image
- Size (X,Y) - size of output image
Output (pixel) values
- Near - points closer to the view plane have higher intensity
values
- Far - points further from the view plane have higher
intensity values
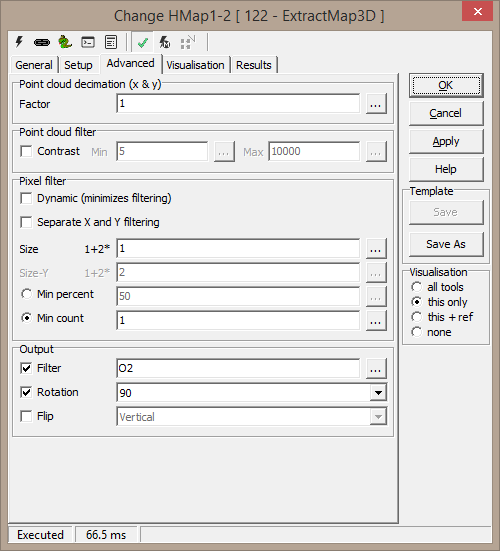
Advanced
Point cloud decimation (x & y)
- Factor - keep only every nth sample in x and y
directions
Point cloud filter
- Contrast - element 4 in a 5-element point cloud; set min and
max allowable value
Pixel filter
This describes a non-linear filter to extract values from a
neighbourhood. It is a simple averaging filter, but with a varying number of
pixels involved.
- Dynamic (minimizes filtering) - when checked, the filter size
is incremented (from 0) for each pixel until a result has been obtained,
or max size has been reached. This will ensure a maximum amount ov valid
output pixels, while reducing the artifacts resulting from the filter.
- Separate X and Y filtering to correct non rectangular pixels
- Size (max) - window size in both x and y; max size if dynamic
filtering
- Min percent - do not produce a result unless at least this
many percent of samples are present within the filter window
- Min count - do not produce a result unless at least this many
samples are present within the filter window
Output
The final output options may filter and rotate/flip the output image
- Filter - standard filter options
- Rotation - 0, 90, 180 or 270 rotation
- Flip - flip output image horizontal or vertical flip
Visualisation
|
Points |
All points within the ROI |
|
ROI |
The ROI cube |
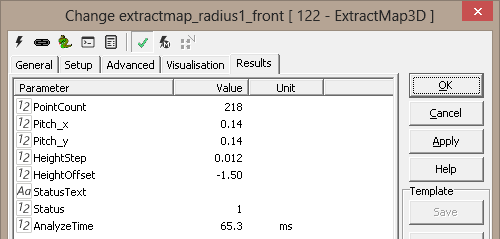
Results
|
Point count |
Number of points within ROI |
|
Pitch.x |
Number of reference units per pixel in the resulting image, x |
|
Pitch.y |
Number of reference units per pixel in the resulting image, y |
|
Height step |
Number of reference units per intensity step (0-255) |
|
Height offset |
Reference units along the view line from the view line start to the
ROI start |
|
