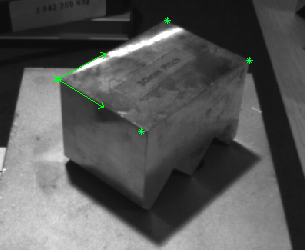
This tool creates a 2D/3D reference from a set of 3 to 12 3D points.For
the best performance, the 3D points should all be coplanar, or close to
coplanar (but of course not collinear).
A best-fit plane is created from the 3D points, and the points are
projected onto this plane prior to performing a coplanar mapping back to a
2D reference system. The new reference system can have its origin and
direction calculated in a number of ways. Both 2D and 3D reference systems
are returned by this tool, where the 2D reference system refers to the x/y
plane (z=0) in 3D. |
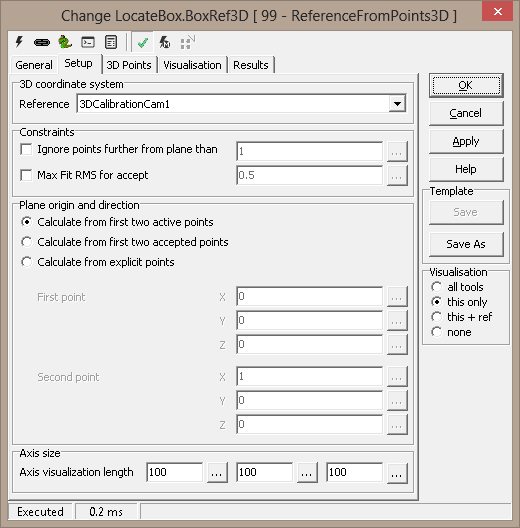
Setup
3D coordinate system
- Reference - select the 3D calibration tool that
describes your camera.
Constraints
- Ignore points further from plane than - if
selected, a second pass is run to fit the plane better,
with outliers removed
- Max Fit RMS for accept - the mean error from
the points used in fitting the plane
Plane origin and direction
The origin of the resulting reference system and the
direction of the X axis is calculated from two points (after
projecting these points onto the plane). The first point
sets the origin, and the direction from this to the second
point will be the X axis.
- Calculate from first two active points - use
the first two active points, whether filtered as
outliers or not
- Calculate from first two accepted points -
use the first two points actually used in the plane fit
- Calculate from explicit points - specify
points in space explicitly
Axis size - defines the length of the 3D axis visualisation
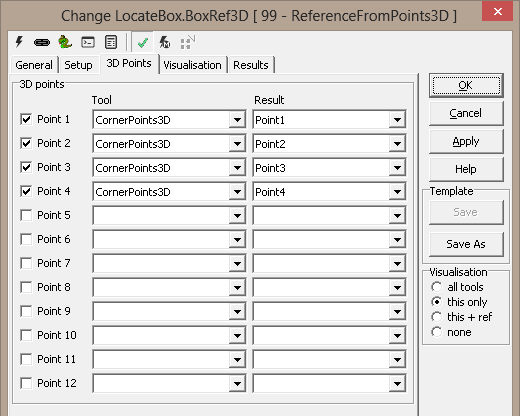
3D Points
At least 3 points must be active for the mapping to
function. Select 3D points that are (nearly) coplanar to
create a new 2/3D reference system based on this 3D plane.
(If 3 non-collinear points are used, the fit is perfect.)
- Tool - tool delivering a 3D point (x, y and z)
- Result - tool result to use
 |
|
Visualisation
|
Axis.(X,Y,Z) |
Resulting (3D) axes for the new reference system |
|
AxisTitle.(X,Y,Z) |
3D axes labels |
|
ChildAxes |
Resulting (2D) axes for the new reference system |
|
PlanePoints |
Points used to create the new reference system |
|
ReferenceAxes |
|
|
ResultAxes |
|
Results
|
Active points |
Number of points marked as active |
|
Valid points |
Number of points marked as valid by the referenced tools |
|
Accepted points |
Number of points used to perform plane fit |
|
Fit RMS |
RMS error from fitting 3D plane to points |
|
Plane origin.x |
Plane origin x coordinate |
|
Plane origin.y |
Plane origin y coordinate |
|
Plane origin.z |
Plane origin z coordinate |
|
X axis.(x,y,z) |
Orientation of the resulting x axis |
|
Y axis.(x,y,z) |
Orientation of the resulting y axis |
|
Z axis.(x,y,z) |
Orientation of the resulting z axis |
|
Plane.x |
Se note below |
|
Plane.y |
|
|
Plane.z |
|
|
Plane.w |
|
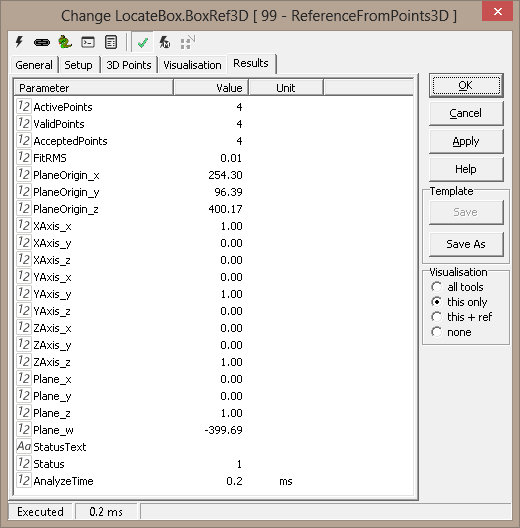
Note: The infinite plane reported is the solution to the equation
ax+by+cz+d=0, where the parameters a, b, c, d are given as the results
Plane.x, Plane.y, Plane.z and Plane.w.
Profiles
| 1: |
SDP-0076-Box-Picking-from-Conveyor |
|
