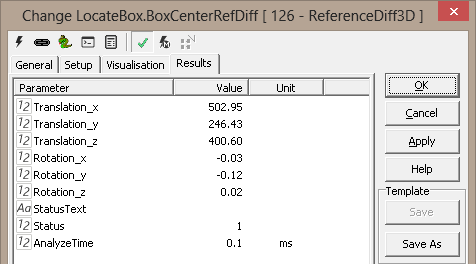
The difference is measured as a translation and a rotation.
These results can e.g. be used for robot guiding.
The results are the necessary
translation/rotation to move from the original to the new
reference system. The order is translate, then rotate, and the Euler angles
are given in XYZ order.
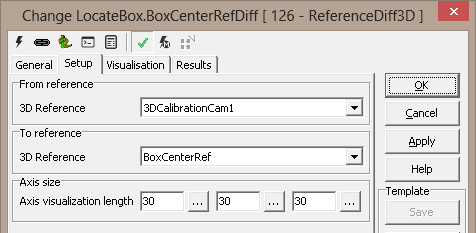
SetupFrom reference
- 3D Reference - the tool you want to measure
difference FROM
To reference
- 3D Reference - the tool you want to measure
difference TO
Axis size
- Axis visualization length - size of the
displayed original 3D axes
Visualisation