|
Scorpion contains a complete set of 3D vision tools including
measurement, 3D camera calibration and stereo vision with two or more cameras.
In addition Scorpion supports 3D Images in the form of point clouds.
The Scorpion 3D model - the basics
The Scorpion 3D model is intimately based on the existing 2D camera/lens
calibration. To build a 3D system, you must perform a lens
calibration for each camera. This is then followed by a 3D calibration,
where a 3D coordinate system is established. The strength with this model is
the fact that you can get very accurate 3D measurements with as little as 6
known points from your 3D calibration object.
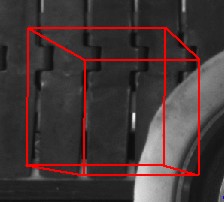
To the right a cube is drawn in a 2D image after 3D Camera Calibration -
more
3D point clouds
With instruments generating proper 3D point clouds (sets of 3D
point positions), the 2D/3D calibration duo is not needed. Visualization of
such point clouds is done in OpenGL-based windows, giving true 3D displays.
Many of the Scorpion 3D tools (and all the geometry tools) can display
results in both 2D and 3D images as needed. You can also extract 3D point
clouds with e.g. the CreatePointCloud3D tool and move between 2D and 3D
views of the same data.
3D image formats are described here
Scorpion 3D tools
The following 3D tools are currently available (note that some of these
tools are still in the alpha or beta stage):
|
