|
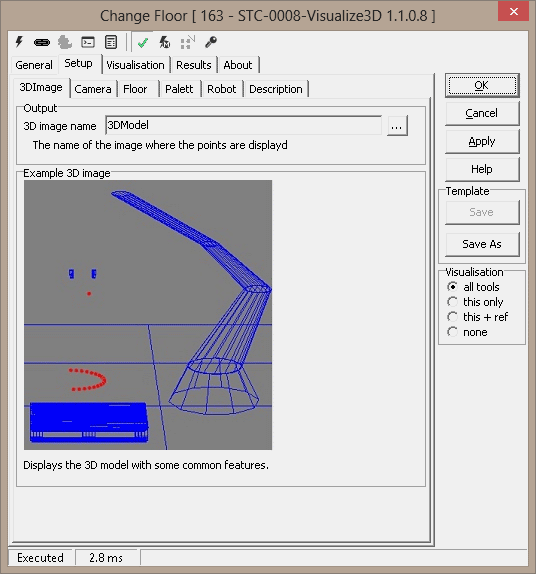
This component displays some features that can enhance the 3D Image
visualisation.
The main purpose of the component is to get a
visualization feedback when configuring the system.
In the 3D Image the above the
- Floor
- the two cameras pose of the Scorpion 3D Stinger Camera
is shown
The STC-0008-Visualize3D component is produced by Tordivel AS.
All rights reserved copyright 2011-2013
Setup
3DImage
Camera
Floor
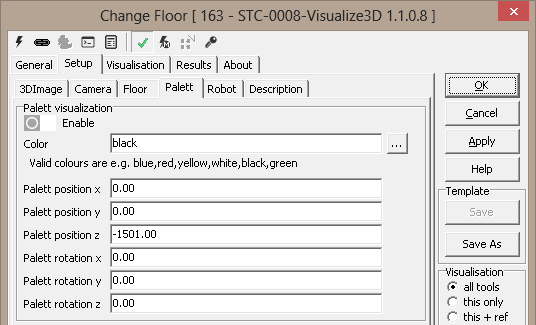
Pallet
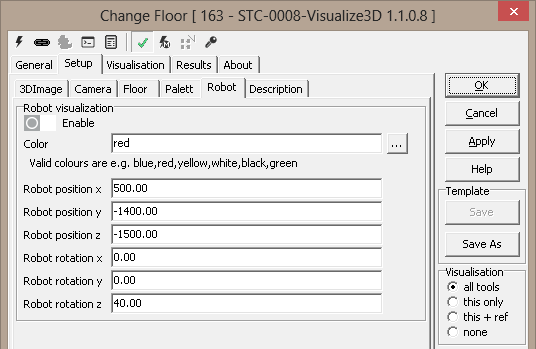
Robot
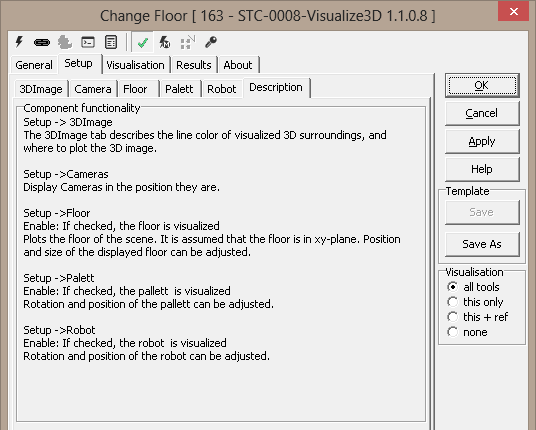
Description
|
Inputs to the Tool: |
| Inputs: |
1. 3DImage
- 3D Image Name
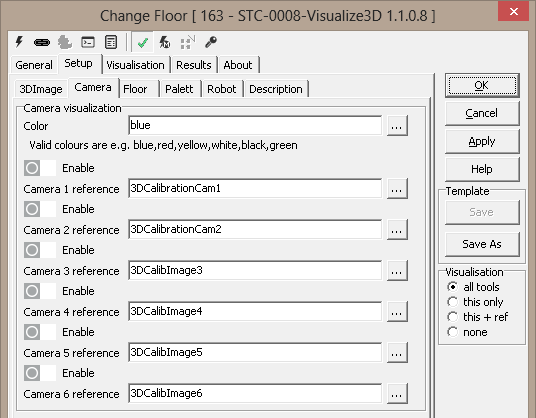
2. Camera Visualization
- Color
- Camera 1-6 reference
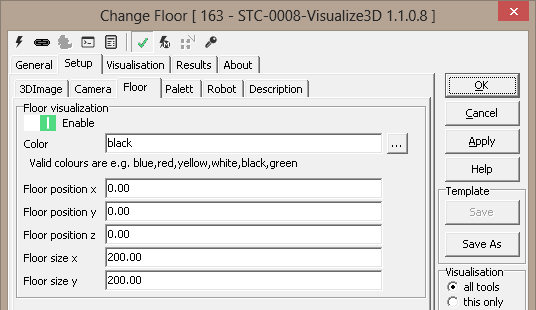
3. Floor Visualization
- Color
- Floor position x,y,z
- Floor size x,y
4. Pallet Visualization
- Color
- Pallet position x,y,z
- Pallet rotation x,y,z
5. Robot Visualization
- Color
- Robot position x,y,z
- Robot rotation z,y,z |
| Uses Reference: |
Yes |
| Uses Image: |
Uses image to draw upon |
| |
|
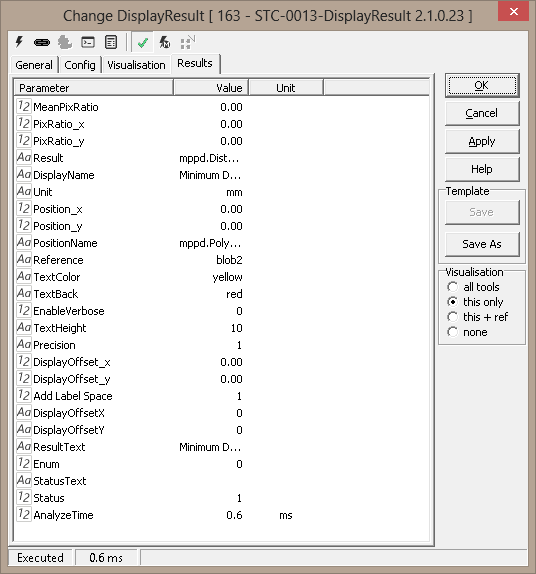
Results
|
Outputs from the Tool: |
| Outputs: |
|
1 |
StatusText: |
Text |
This is a
standard
output from
all Scorpion
tools and
describes
the
processing
status |
|
2 |
Status: |
Numeric |
This is a
standard
output from
all Scorpion
tools and
indicates
error/success
of the tool
processing.
1 indicates
success and
0 indicates
error. |
|
3 |
AnalyzeTime: |
Numeric |
This is a
standard
output from
all Scorpion
tools and
indicates
the time
taken by the
last
processing
operation of
this tool |
|
| Visualizations: |
None |
| Reference outputs: |
None |
| |
|
|
Templates: |
| Supports Templates: |
No |
| |
|
|
Profiles: |
| 1: |
SDP-2012-0048-Scorpion3DSmartCam-LocateGear |
|
