|
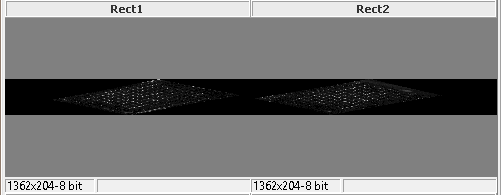
The tool produces a stereo rectified pair of images that can be used to
create a disparity map or 3D image from a two 3D stereo calibrated cameras.
The tool works in conjuction with
STC-0083-DisparityMap3D.
The STC-0084 StereoRectify3D component is produced by Tordivel AS.
All rights reserved copyright 2011-2013
Setup
Configuration
General
|
Inputs to the Tool: |
| Inputs: |
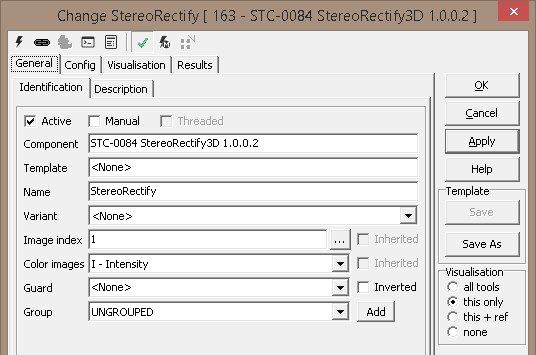
1. General
- Identification
- Active
- Manual
- Threaded
- Component
- Template
- Name
- Variant
- Image index
- Color images
- Guard
- Group
- Description
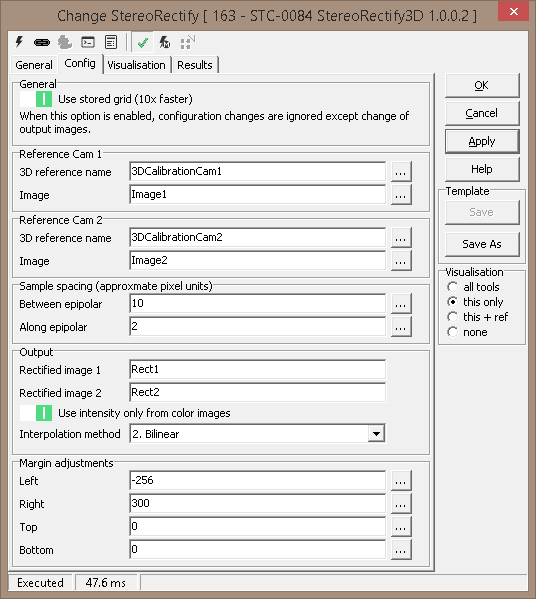
2. Config
- General
- Use stored grid (10x faster)
- When this option is enabled, configuration
changes are ignored except changes of output
images.
- Reference Cam 1 & 2
- 3D reference name
- Image
- Sample spacing (approximate pixel units)
- Between and along epipolar
- Output
- Rectified image 1 & 2
- Use intensity only from color images
- Interpolation method
- Margin adjustments
- Left, right, top, bottom
|
| Uses Reference: |
Yes |
| Uses Image: |
Uses image to draw upon |
| |
|
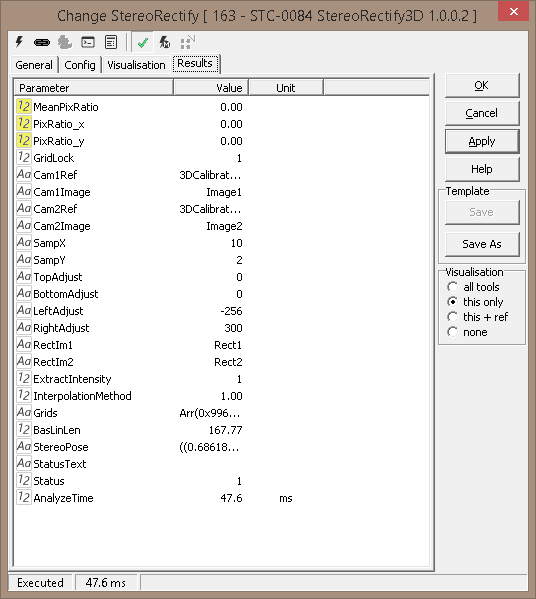
Results
|
Outputs from the Tool: |
| Outputs: |
|
1 |
StatusText: |
Text |
This is a
standard
output from
all Scorpion
tools and
describes
the
processing
status |
|
2 |
Status: |
Numeric |
This is a
standard
output from
all Scorpion
tools and
indicates
error/success
of the tool
processing.
1 indicates
success and
0 indicates
error. |
|
3 |
AnalyzeTime: |
Numeric |
This is a
standard
output from
all Scorpion
tools and
indicates
the time
taken by the
last
processing
operation of
this tool |
|
| Visualizations: |
None |
| Reference outputs: |
None |
| |
|
|
Templates: |
| Supports Templates: |
No |
| |
|
|
Profiles: |
| 1: |
STP-0072-DisparityMap |
|
